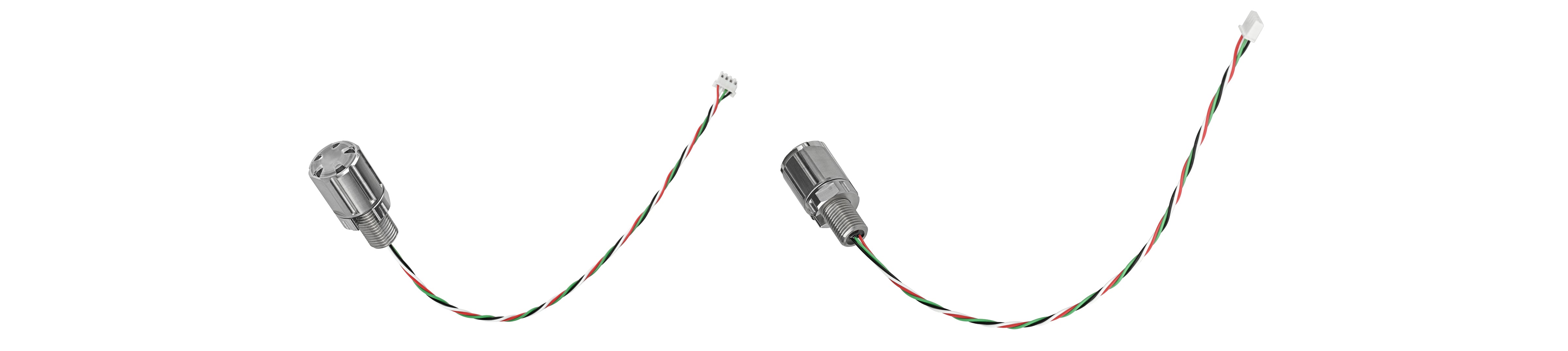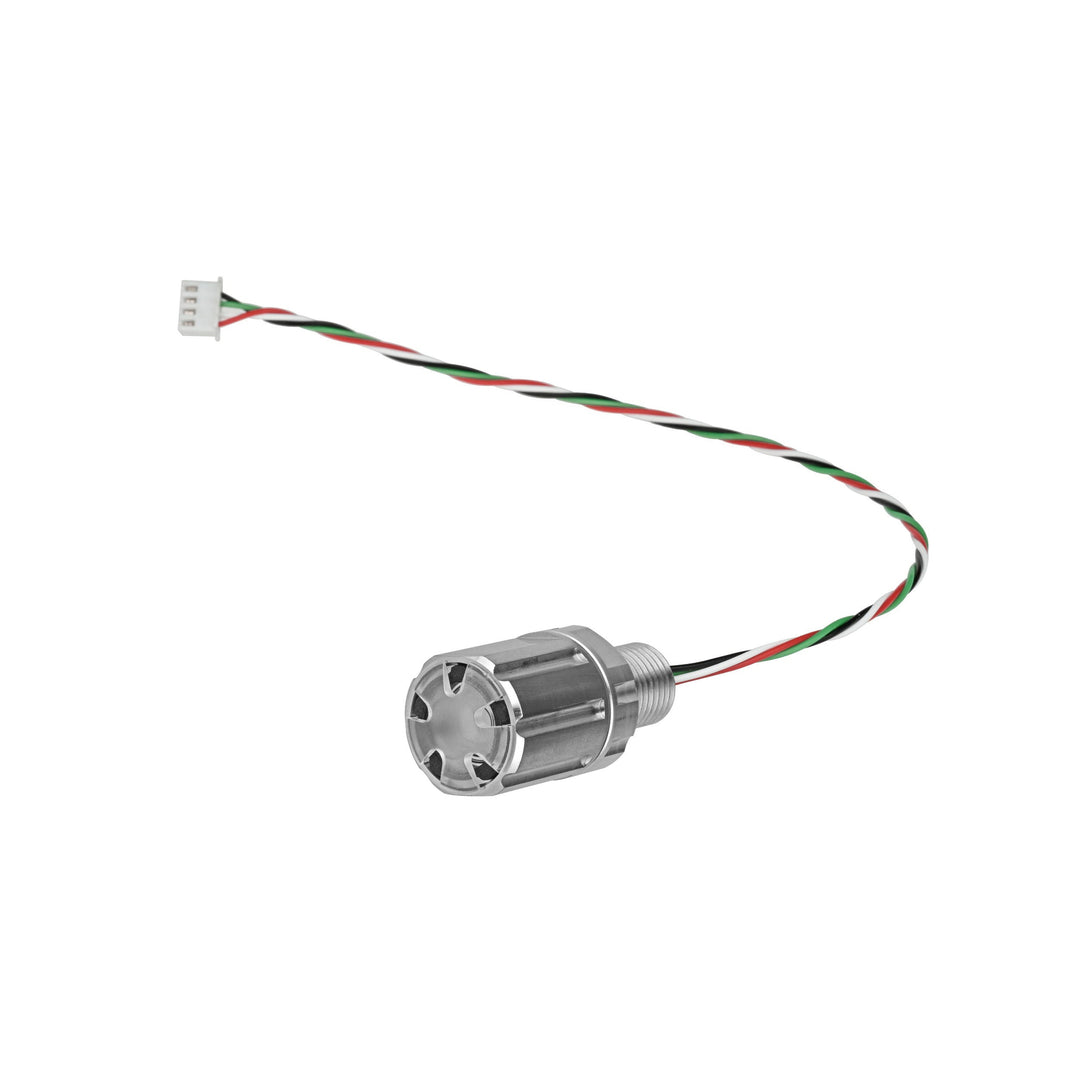

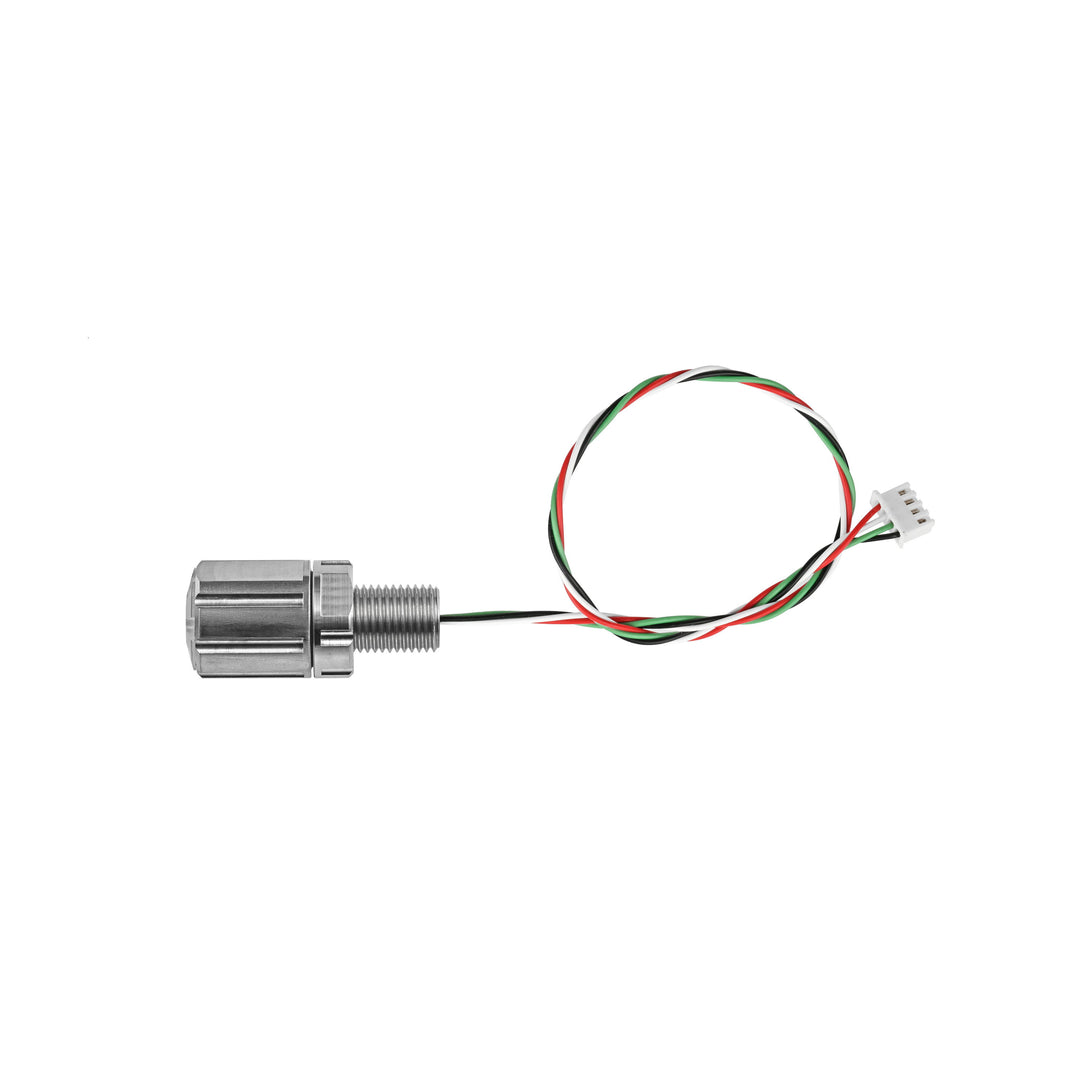
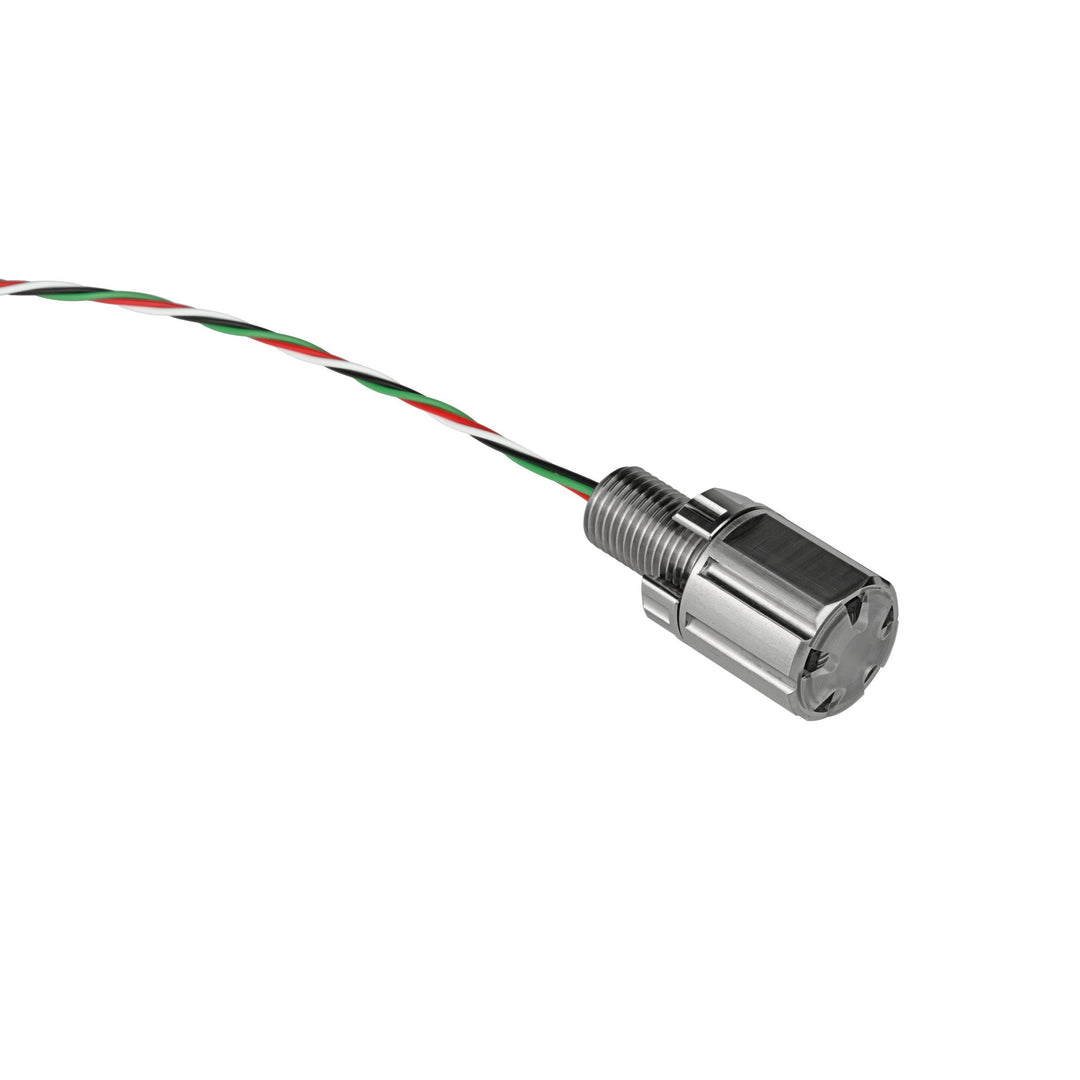
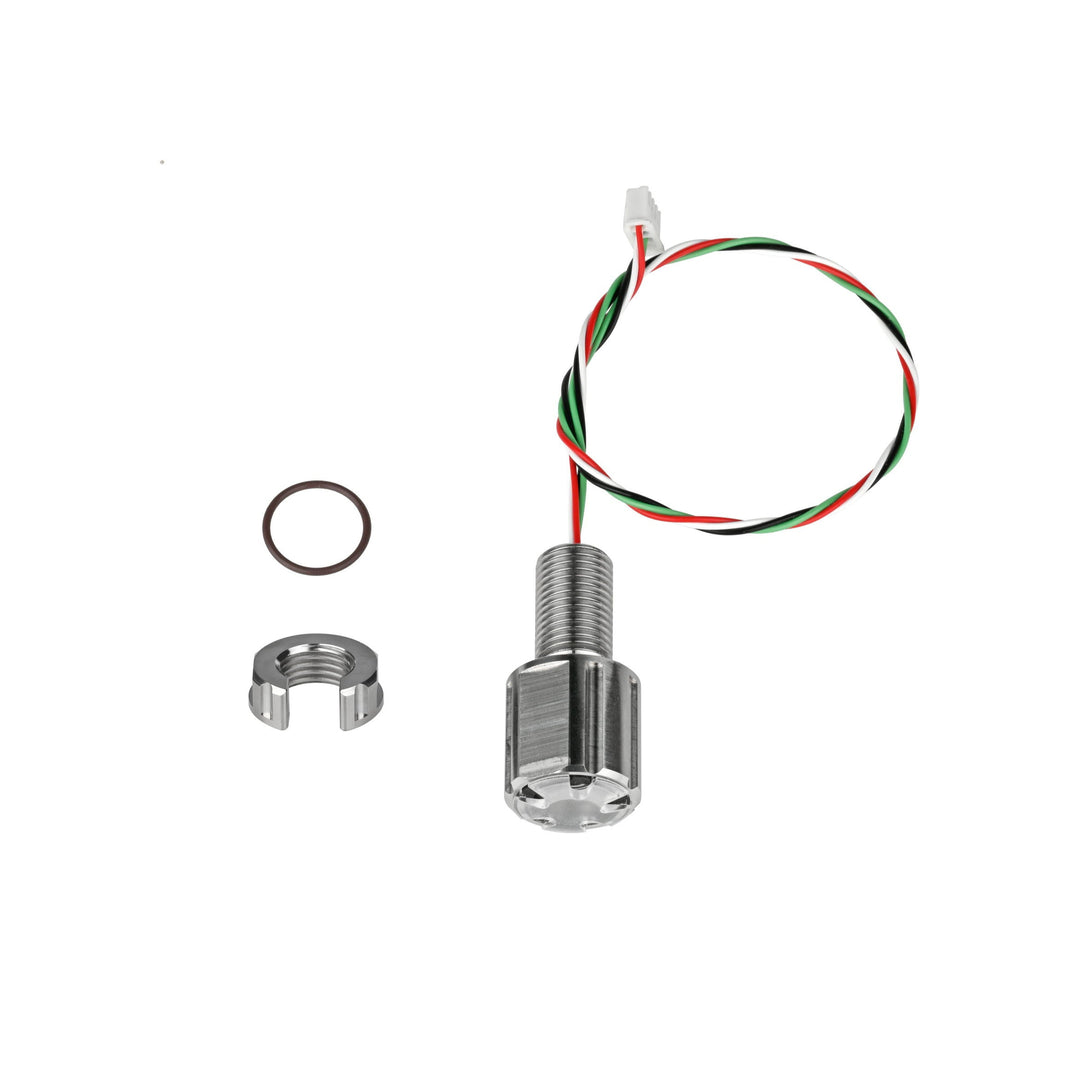








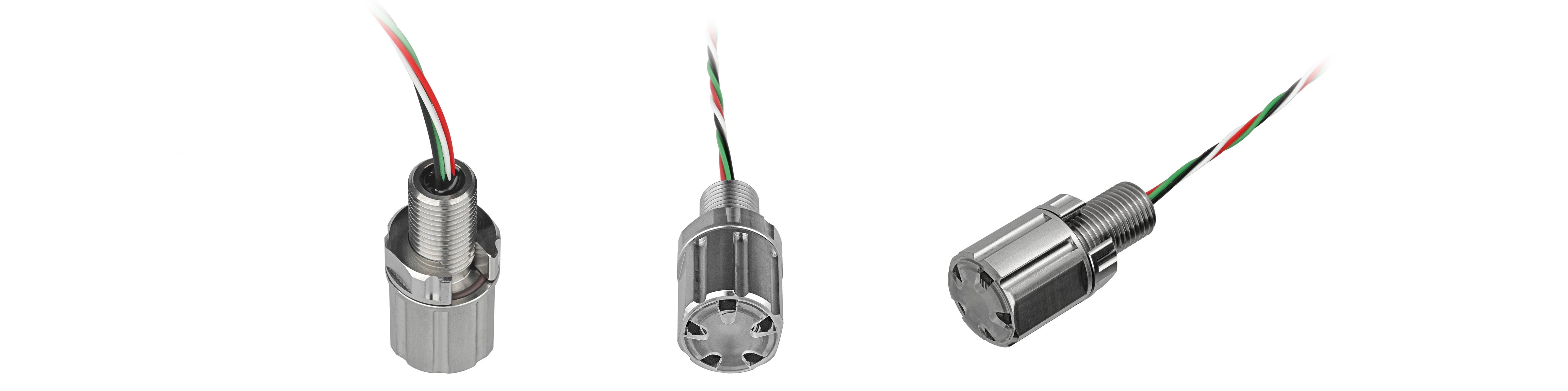
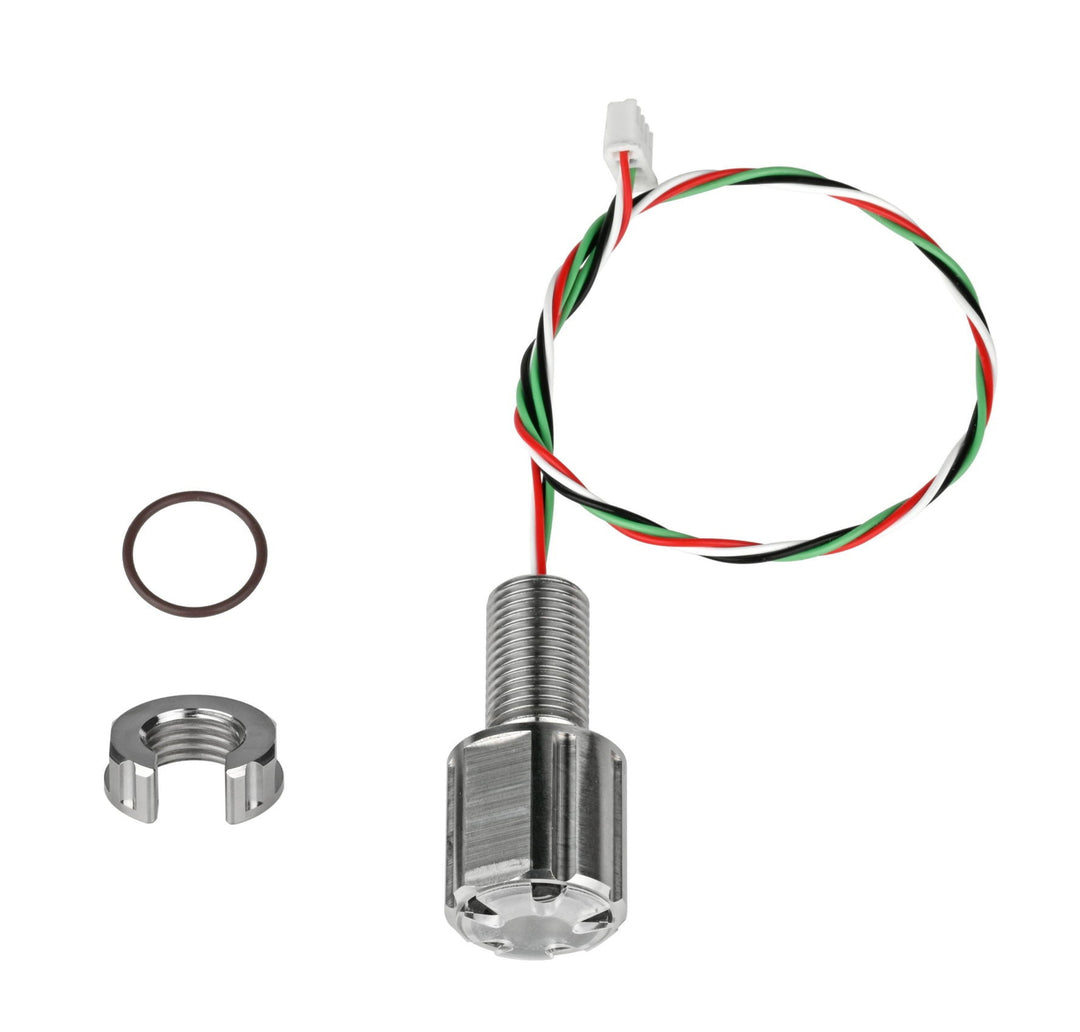
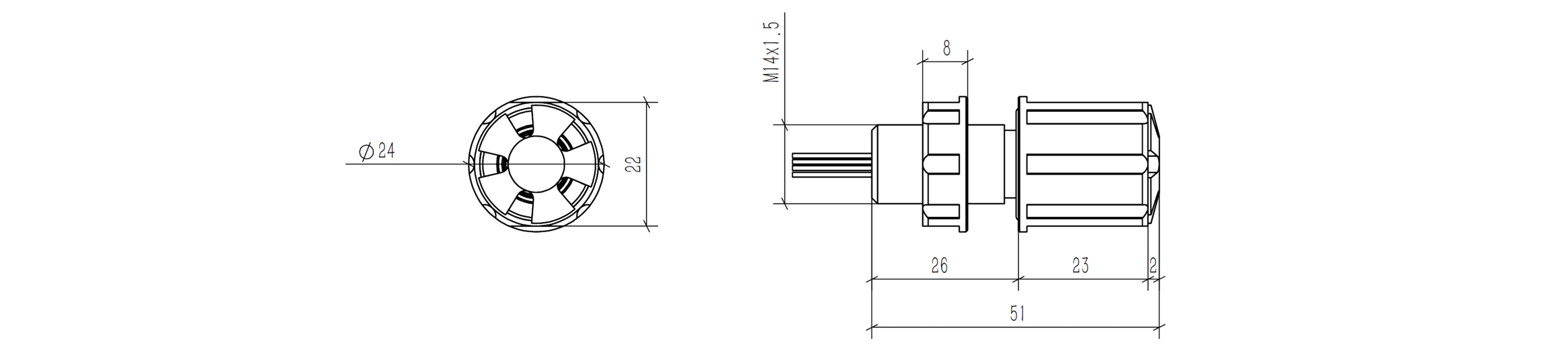
Subsea M14-dybdesensoren med metalmembran er udviklet til langvarig nedsænkning og holdbarhed i krævende undervandsmiljøer. Den er udstyret med en robust membran i rustfrit stål, der overfører det ydre vandtryk til det indre målekredsløb via et kammer fyldt med silikoneolie. Denne konstruktion muliggør vedligeholdelsesfri drift uden behov for daglig tørring – ideelt til scenarier med kontinuerlig anvendelse.
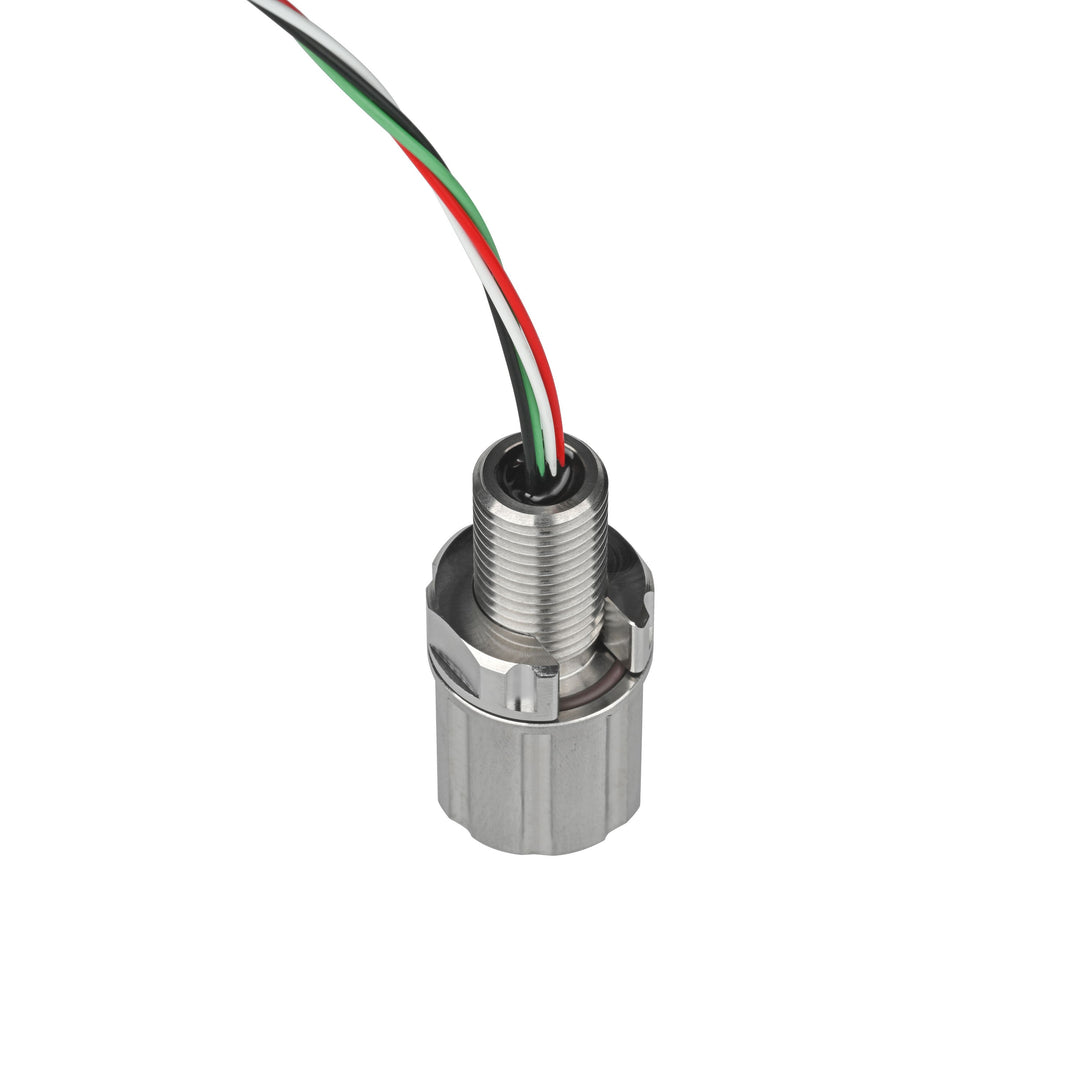
Kernen består af et integreret beregningskort, der indsamler 24-bit tryk- og temperaturdata, foretager temperaturkompensation og udsender beregnede dybde- og temperaturmålinger i realtid. Disse udgangssignaler overføres via en seriel grænseflade ved hjælp af TTL-niveau USART-kommunikation (5 V-logik, 115200 bps). I modsætning til I²C-baserede dybdesensorer, der kommunikerer direkte med Pixhawk eller lignende ArduSub-systemer, kommunikerer denne sensor via UART og kræver en mikrocontroller eller en ledsagende computer, der kan læse serielle TTL-data. Der medfølger et standard 4-polet XH2.54-stik og en 300 mm pigtail-ledning for nem integration.
Denne arkitektur tilbyder forbedret nøjagtighed og pålidelighed, især til anvendelser med højt tryk eller langvarig brug, hvor robusthed er afgørende. Det forseglede interne olie- og membran-design isolerer desuden sensorelementerne mod fysisk forurening eller saltindflydelse. Til anvendelser, hvor høj holdbarhed og fravær af daglig vedligeholdelse er prioriteter, udgør denne sensor en robust opgraderingsmulighed sammenlignet med mere kompakte I²C-baserede løsninger.

Denne sensor er ideel til langvarig nedsænkning og anvendelser, hvor der stilles høje krav til pålidelighed. Til kompakte og omkostningseffektive installationer findes der to andre Blu-Sub-dybdesensorer, der anvender MS5837-chipplatformen.
Undervands M8-dybdesensor (0–30 bar)
Ultrakompakt I²C-baseret dybdesensor med fast beskyttelseskappe og M8-gevindhus, designet til integration med Pixhawk/ArduSub i systemer med begrænset plads.
Subsea M10-dybdesensor (0–30 bar)
Mellemstor I²C-kompatibel sensor med aftagelig beskyttelseskappe og M10-gevindhus, ideel til modulopbyggede konstruktioner og nem adgang til vedligeholdelse.

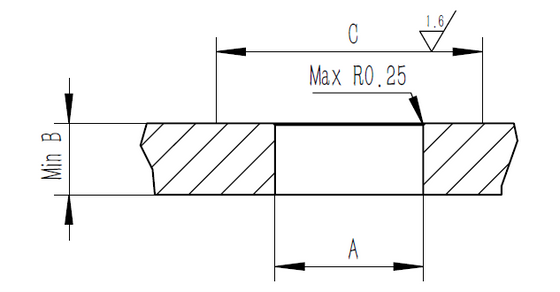
Subsea M14-dybdesensoren med metalmembran kan monteres i en række forskellige Blu-Sub-undervandsbeholdere ved hjælp af et M14-monteringshul i passende størrelse. Hvert hus skal sikre korrekt tætning, skottetykkelse og indvendig plads til sensorhuset og ledningsføringen.
Vandtæt undervandsbeholder
Kompakt aluminiumskabinet klassificeret til 300 m, forboret med tyve M10-porte – ideelt til M10-sensorer, indikatorer eller afbrydere. Montering af en M14-sensor kræver specialboring.
Undervandsbeholder i akrylrør
Gennemsigtigt støbt akrylhus, der er klassificeret til 250 m, og som bruges sammen med kompatible endekapper og flanger. Installation af en M14-sensor kræver en specialboret endekappe i aluminium eller akryl for at sikre korrekt tætning og støtte.
Undervandsbeholder i aluminium
Robust aluminiumskabinet klassificeret til 1.000 m. Installation af en M14-sensor kræver en specialboret endekappe i aluminium eller akryl for at sikre sikker montering og tætning. Ideel til langvarige installationer eller installationer i dybt vand.
| Specifikation | M14 dybdesensor |
|---|---|
| Gevind | M14 × 1,5 |
| Materiale | Rustfrit stål |
| Spænding | 5 V |
| Nominel strøm | 20 mA |
| Kommunikationsmode | USART (TTL) |
| Baudrate | 115200 |
| Trykområde | 0–35 bar |
| Overtryk | 2 × trykområde |
| Indbygget fejl | ±0,2 % FS (±0,72 m) |
| Samlet fejlinterval | ±1 % FS (3,6 m) |
| Driftstemperatur | -10 ~ 80 ℃ |
| Temperaturnøjagtighed | ±2 ℃ |
| Ledningslængde | Ca. 300 mm |
| Stiktype | XH2,54–4-polet |

| Anbefalet størrelse | M14 dybdesensor |
|---|---|
| Anbefalet størrelse på gennemgående hul i skottet (A) | Ø14,1 ± 0,1 |
| Tykkelse på lugeafdækning (B) | 18 mm |
| Overfladeområde (C) | 26 mm |
| Etiket | Tråd | Navn | Funktionsbeskrivelse |
|---|---|---|---|
| 1 | Rød | + | Strømforsyningens positive pol (5 Vdc) |
| 2 | Hvid | TX | Seriell port – udsendelse (TXD) |
| 3 | Grøn | RX | Modtagelse via seriel port (RXD) |
| 4 | Sort | - | Strømforsyningens minuspol (GND) |
| Ekstern controller | M14-dybdesensor |
|---|---|
| 5 V | 5 V |
| RXD | TXD |
| TXD | RXD |
| GND | GND |
T=XX.XXD=XX.XX\r\n\r\n: Slutningen af hver datalinjeT=25.27D=1.21 betyder 25,27 °C og 1,21 m| Seriel kommando | Beskrivelse | Standardværdi |
|---|---|---|
!Fxxxx\r\n |
Indstil sensoren til at beregne ud fra en bestemt vægtfylde. "xxxx" angiver den indstillede væsketæthed. Ferskvand: 997 kg/m³ | Saltvand: 1029 kg/m³ |
997 |
!Dxx.xx\r\n |
Reserveret kommando til justering af forskydningen for dybdeudgangen. "xx.xx" er en offset med flydende komma. |
0 |
!Txx.xx\r\n |
Reserveret kommando til justering af temperaturudgangens offset. "xx.xx" er en offset med flydende komma. |
0 |
!!\r\n |
Sæt sensorudgangen på pause. Den serielle port sender alle parametre. | Ingen |
!R\r\n |
Nulstil beregningsbrættet. | Ingen |
!r\r\n |
Gendan alle standardindstillinger. | Ingen |
!C\r\n |
Nulstil alle offset-indstillinger. | Ingen |
!!\r\n):!D0.55 anvendt på en måleværdi på -0,55 → Output = 0,00!D-0.10 anvendt på en måleværdi på 0,10 → Udgang = 0,00!T1.00 anvendt ved 25,00 °C → Udgangstemperatur = 26,00 °C!T-1.00 anvendt ved 25,00 °C → Udgangstemperatur = 24,00 °C!Txx.xx\r\n ved at bruge en kendt ekstern temperaturkilde som reference.
Er der et indbygget beregningskort?
Ja. Sensoren indeholder et internt solver-kort, der registrerer 24-bit tryk- og temperaturdata, foretager temperaturkompensation og udsender dybde- og temperaturmålinger i realtid via en TTL-seriel grænseflade.
Kan ledningerne forlænges?
Sensoren bruger TTL-seriel kommunikation, hvilket ikke er ideelt til lange kabelføringer. Hvis der er behov for forlængede ledninger, skal du bruge en niveauomformer til at konvertere til RS-232 eller RS-485 for at reducere bitfejlraten (BER).
Skal sensoren kalibreres? Hvilke data sendes ud via den serielle port?
Sensoren udsender dybde- og temperaturværdier direkte via den serielle port. Kalibrering kan foretages ved overfladen, hvis det er nødvendigt, men uddataene er allerede behandlet og kræver ingen yderligere afkodning eller kompensation.
Hvad sker der, hvis metalmembranen er ridset eller bulet?
Hvis membranen er deformeret – f.eks. på grund af skader fra en skruenøgle eller huller – bør den ikke bruges, da dette kan kompromittere både datanøjagtigheden og tætningens integritet.
Kan jeg trykke på sensoren med fingeren for at teste den?
Nej. Manuelt tryk er ujævnt og kan deformere den følsomme metalmembran, især med neglene. Undgå enhver form for direkte tryktest.
Er den direkte kompatibel med ArduSub?
Nej, sensoren bruger TTL-seriel udgang og er ikke plug-and-play med ArduSub-systemer. Integration kræver specialudviklet firmware eller yderligere grænseflader.