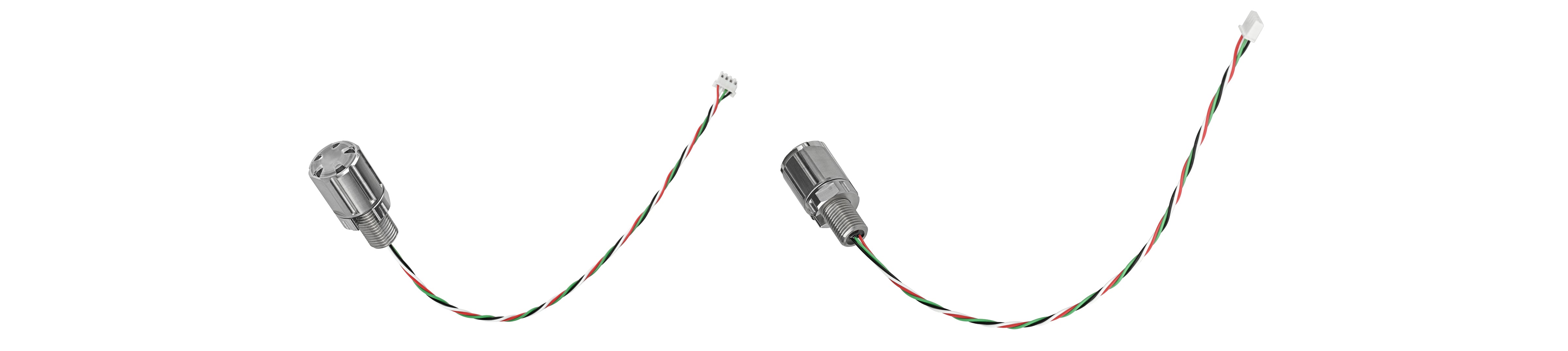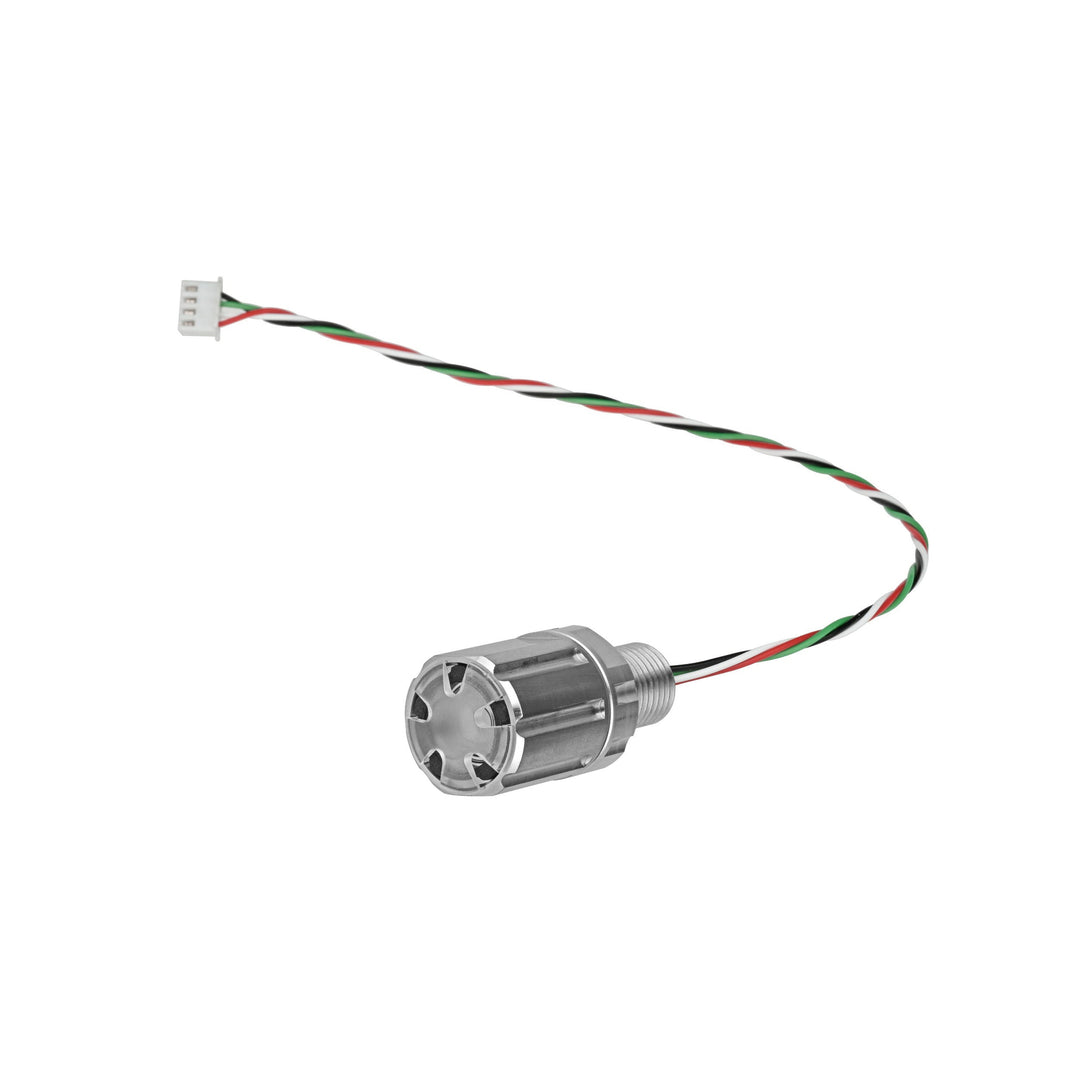

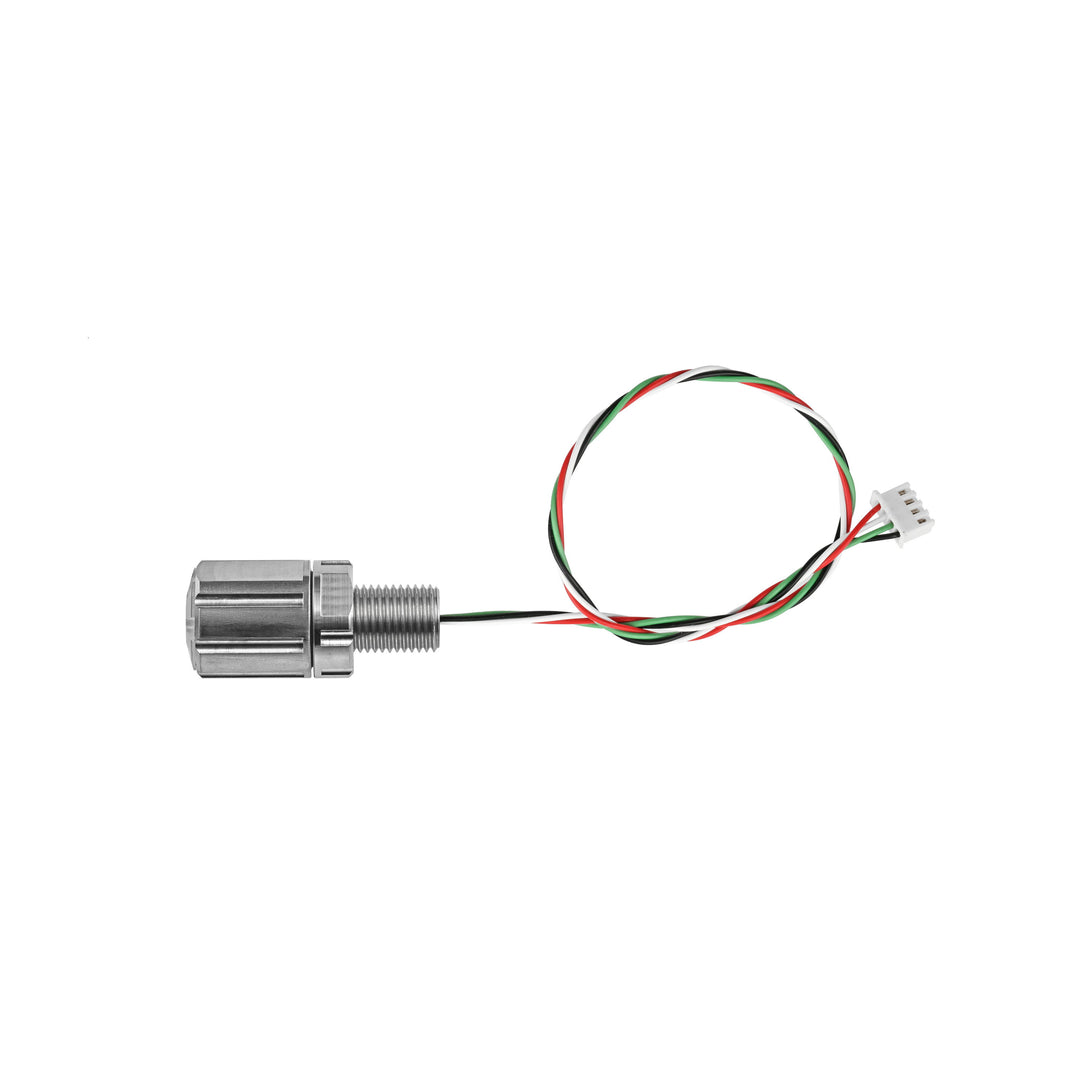
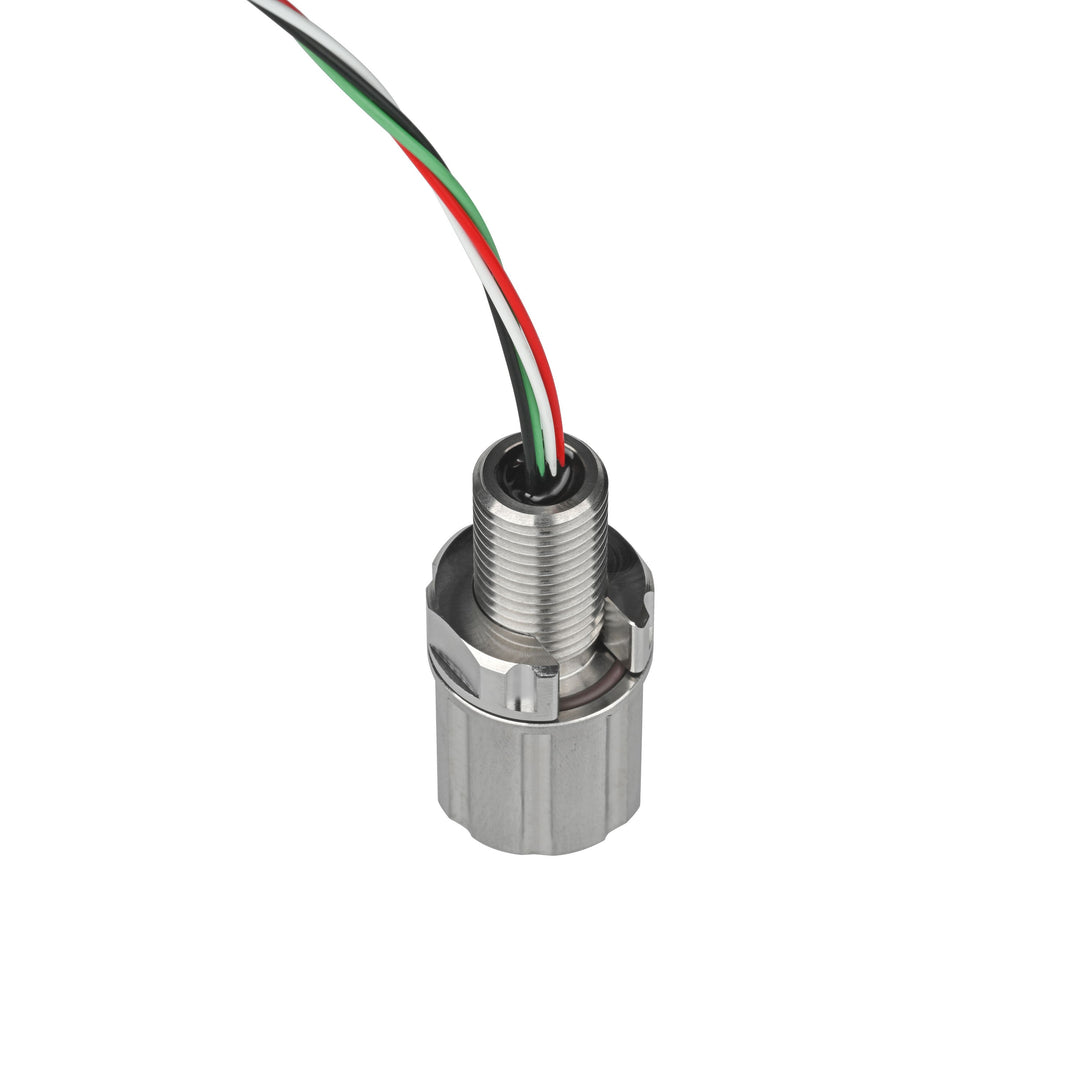
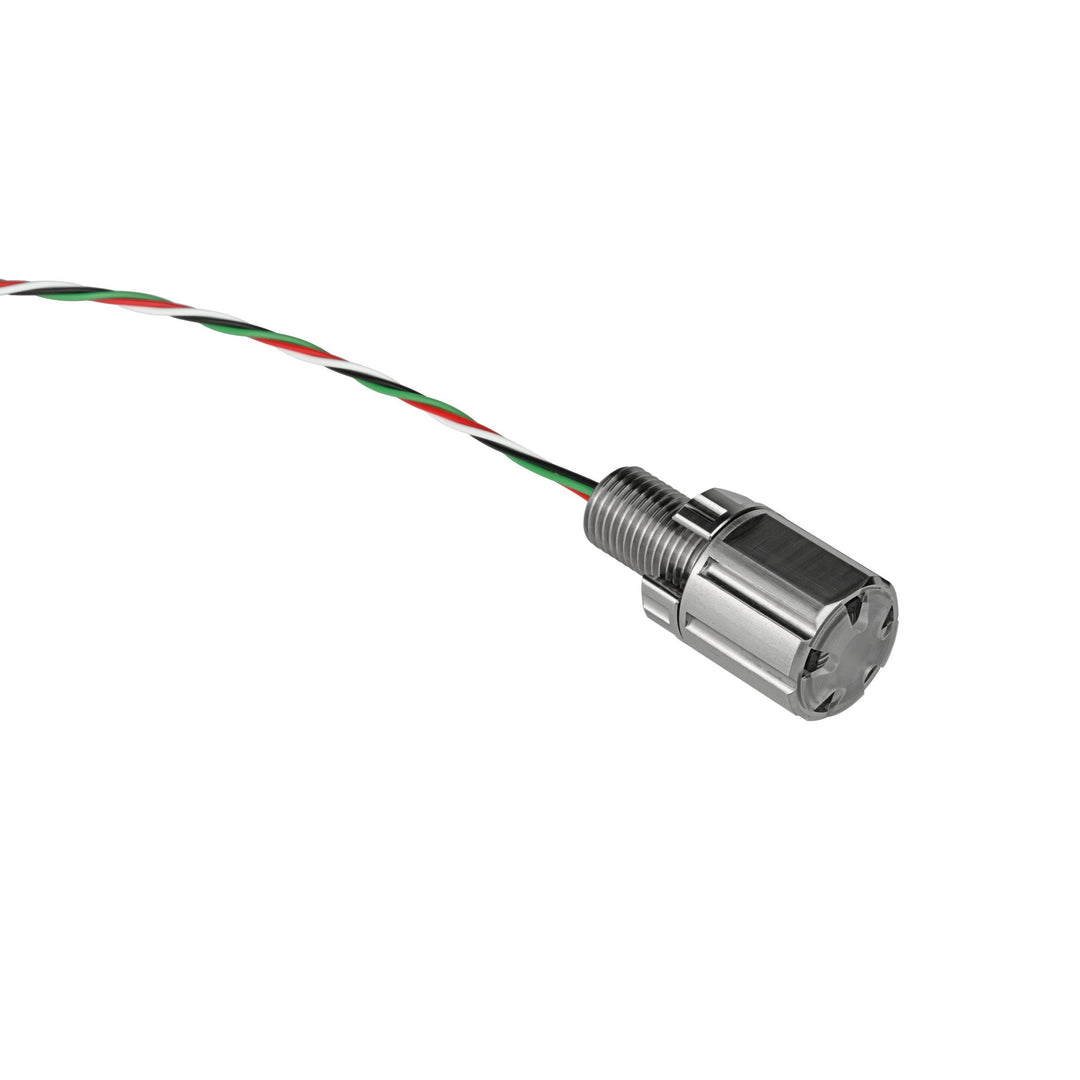
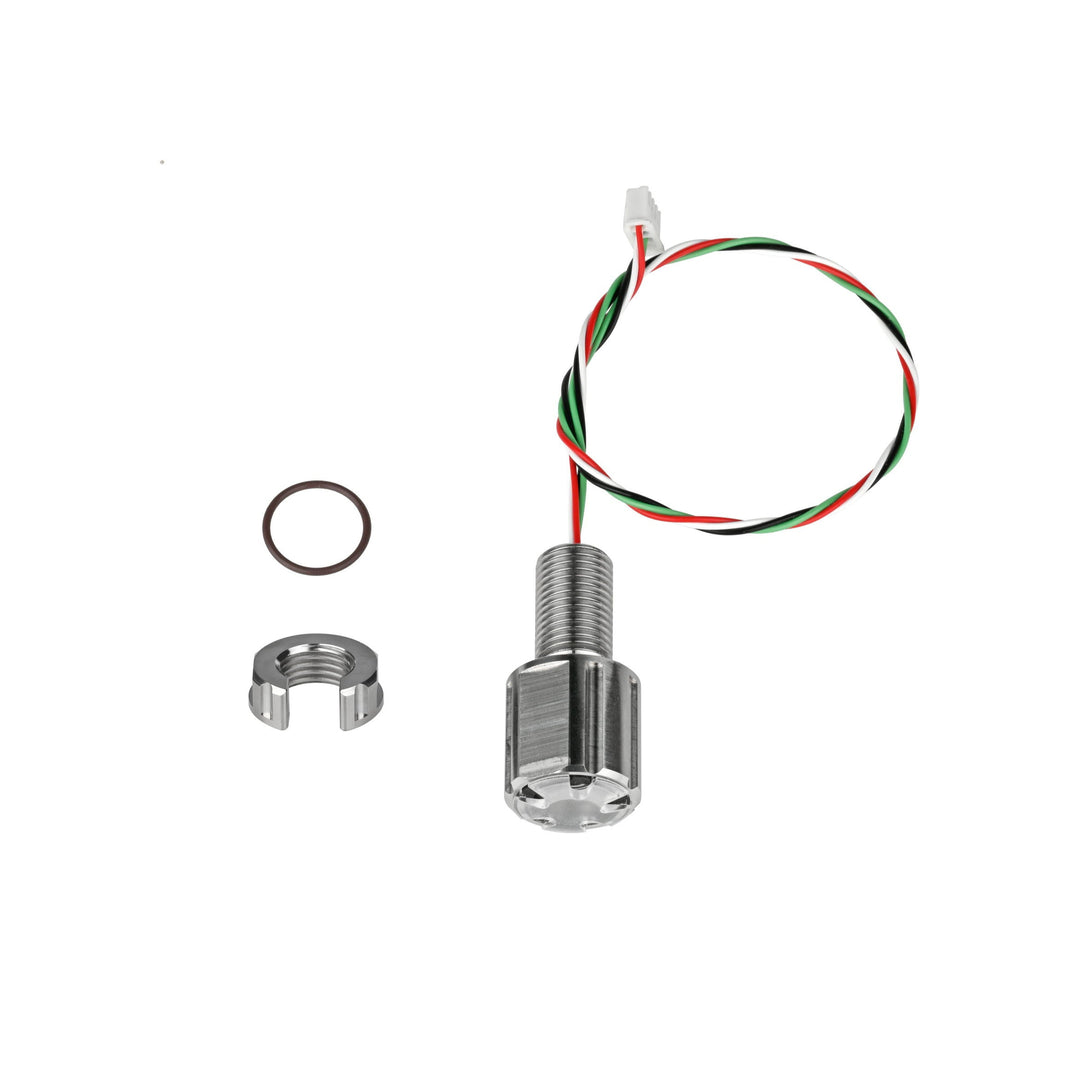








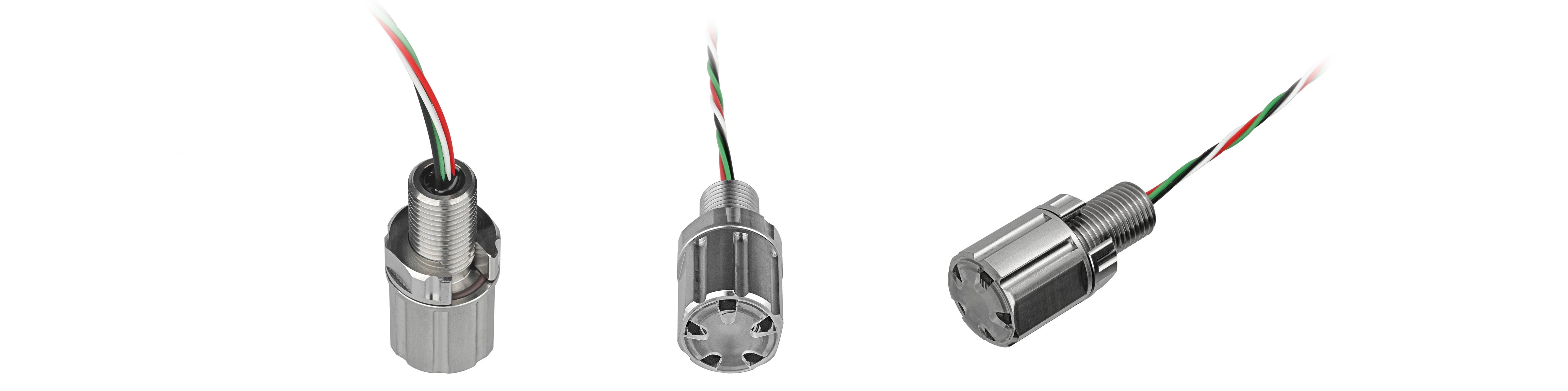
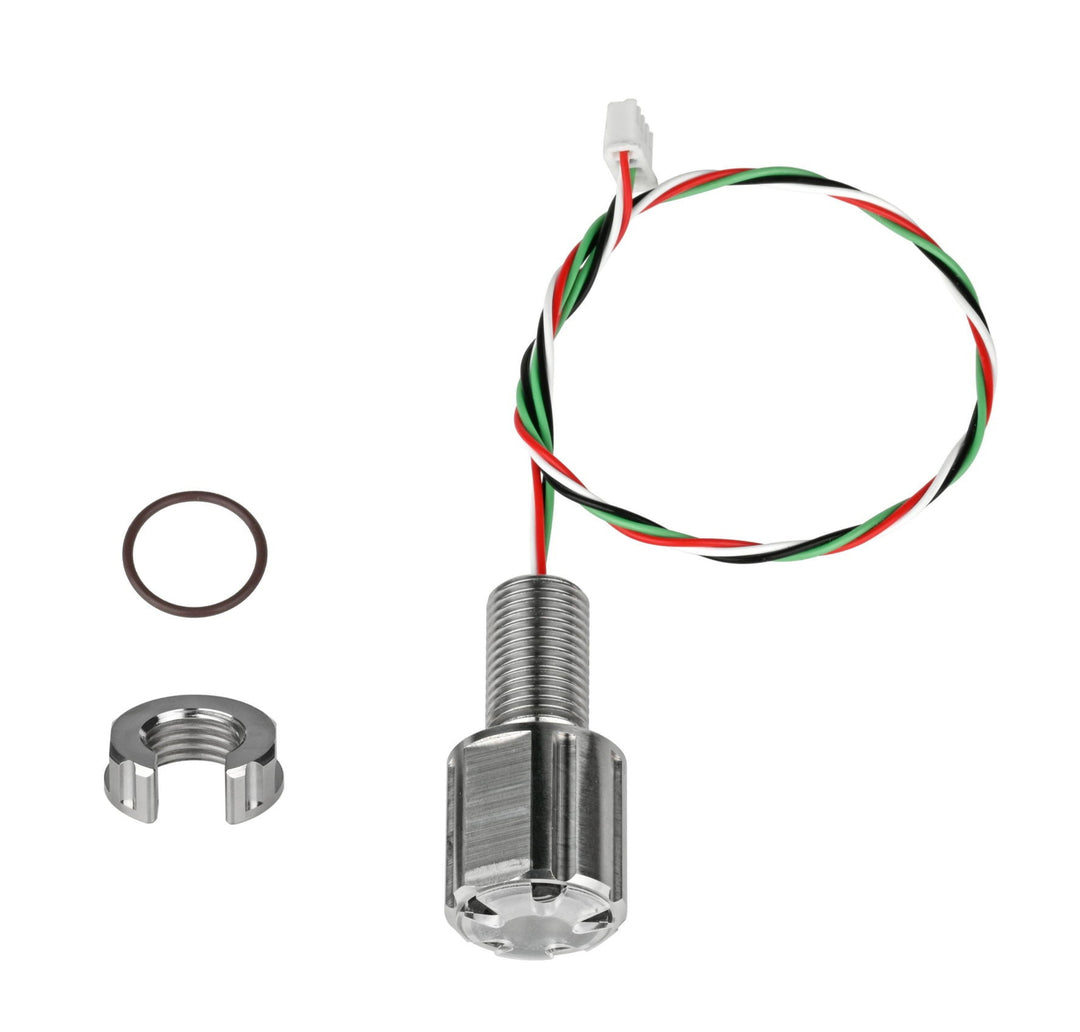
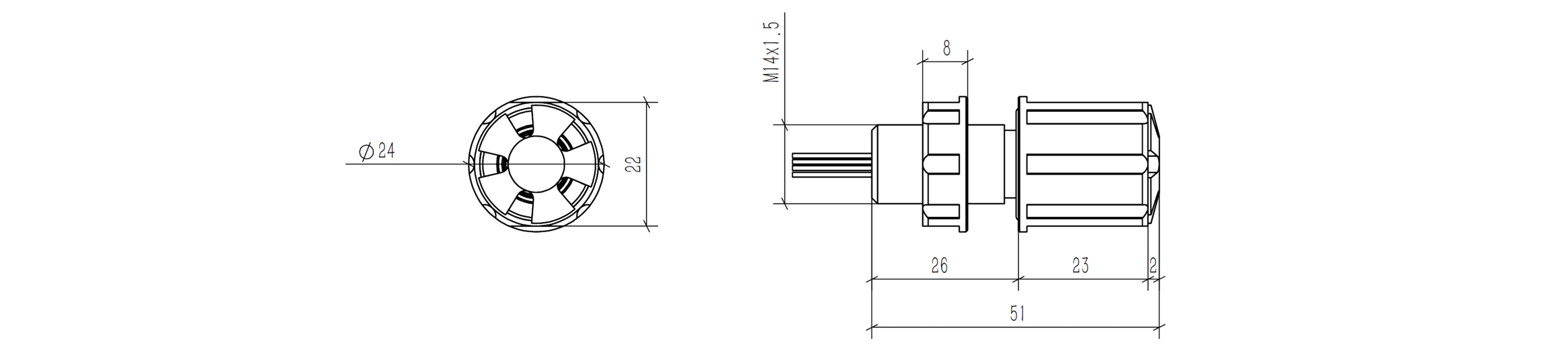
Subsea M14 dybdesensor med metalldiaphragma er utviklet for langvarig nedsenking og høy slitestyrke i krevende undersjøiske miljøer. Den har en robust membran i rustfritt stål som overfører det ytre vanntrykket til den interne sensorkretsen via et kammer fylt med silikonolje. Denne konstruksjonen muliggjør vedlikeholdsfri drift uten behov for daglig tørking – ideelt for kontinuerlige installasjoner.
Kjernen består av et integrert prosessorkort som samler inn trykk- og temperaturdata med 24-bits oppløsning, utfører temperaturkompensasjon og leverer ferdig beregnet dybde- og temperaturinformasjon i sanntid. Dataene sendes via et seriellgrensesnitt med TTL-nivåer (USART, 5 V logikk, 115200 bps). I motsetning til I²C-baserte dybdesensorer som kan kobles direkte til Pixhawk eller andre ArduSub-systemer, kommuniserer denne sensoren via UART og krever en mikrokontroller eller en tilleggsdatamaskin som kan lese TTL-seriell data. En standard 4-pins XH2.54-kontakt og en 300 mm kabelhale er inkludert for enkel integrasjon.
Denne arkitekturen gir forbedret nøyaktighet og pålitelighet, spesielt for høytrykks- eller langtidsapplikasjoner der robusthet er avgjørende. Det forseglede oljekammeret og membrandesignet beskytter i tillegg sensorelementene mot fysisk forurensning eller salinitetsdrift. For bruksområder som krever høy slitestyrke og null daglig vedlikehold, tilbyr denne sensoren et solid oppgraderingsalternativ sammenlignet med mer kompakte I²C-baserte løsninger.

Denne sensoren er ideell for langtids nedsenking og applikasjoner som krever høy pålitelighet. For kompakte og kostnadseffektive installasjoner finnes det to andre Blu-Sub-dybdesensorer basert på MS5837-plattformen.
Subsea M8-dybdesensor (0–30 bar)
Ultrakompakt dybdesensor med I²C-grensesnitt, fast beskyttelsesdeksel og M8-gjenger, utviklet for Pixhawk/ArduSub-integrasjon i systemer med begrenset plass.
Subsea M10-dybdesensor (0–30 bar)
Mellomstor I²C-kompatibel sensor med avtakbart beskyttelsesdeksel og M10-gjenger, ideell for modulære konstruksjoner og enkel vedlikeholdstilgang.

Subsea M14 dybdesensor med metalldiaphragma monteres i en rekke Blu-Sub undervannskapslinger ved hjelp av et korrekt dimensjonert M14-monteringshull. Hver kapsling må gi riktig tetting, skottetykkelse og innvendig klaring for sensorhuset og kablingen.
Vanntett undervannskapsling
Kompakt aluminiumskapsling med dybderating på 300 m, forhåndsboret med tjue M10-porter—ideell for M10-sensorer, indikatorer eller brytere. Montering av en M14-sensor krever spesialboring.
Akrylrør for undervannskapsling
Gjennomsiktig kapslingsrør i støpt akryl med dybderating på 250 m, brukt sammen med kompatible endelokk og flenser. Montering av en M14-sensor krever et spesialboret endelokk i aluminium eller akryl for å sikre riktig tetting og støtte.
Aluminiumsrør for undervannskapsling
Robust aluminiumskapsling med dybderating på 1 000 m. Montering av en M14-sensor krever et spesialboret endelokk i aluminium eller akryl for å sikre trygg montering og tetting. Ideell for langtidsbruk eller operasjoner på dypt vann.
| Spesifikasjon | M14 dybdesensor |
|---|---|
| Gjenge | M14 × 1.5 |
| Materiale | Rustfritt stål |
| Spenning | 5 V |
| Nominell strøm | 20 mA |
| Kommunikasjonsmodus | USART (TTL) |
| Baudrate | 115200 |
| Trykkområde | 0–35 bar |
| Overtrykk | 2 × trykkområde |
| Indre feilmargin | ±0,2 % FS (±0,72 m) |
| Total feilmargin | ±1 % FS (3,6 m) |
| Driftstemperatur | -10 ~ 80 ℃ |
| Temperaturnøyaktighet | ±2 ℃ |
| Ledningslengde | Ca. 300 mm |
| Kontakt-type | XH2.54–4Pin |

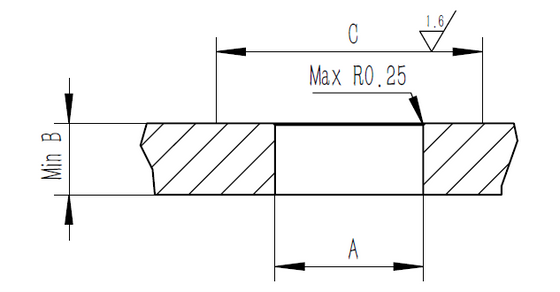
| Anbefalt størrelse | M14 dybdesensor |
|---|---|
| Anbefalt gjennomgående hullstørrelse på bulkhead (A) | Ø14,1 ± 0,1 |
| Hatchdekseltykkelse (B) | 18 mm |
| Overflateområde (C) | 26 mm |
| Label | Ledning | Navn | Funksjonsbeskrivelse |
|---|---|---|---|
| 1 | Rød | + | Positiv strømforsyning (5 V DC) |
| 2 | Hvit | TX | Seriellport – send (TXD) |
| 3 | Grønn | RX | Seriellport – mottak (RXD) |
| 4 | Svart | - | Negativ strømforsyning (GND) |
| Ekstern kontroller | M14 dybdesensor |
|---|---|
| 5 V | 5 V |
| RXD | TXD |
| TXD | RXD |
| GND | GND |
T=XX.XXD=XX.XX\r\n\r\n: Slutt på datalinjenT=25.27D=1.21 betyr 25,27 °C og 1,21 m| Seriell kommando | Beskrivelse | Standardverdi |
|---|---|---|
!Fxxxx\r\n |
Setter sensoren til å beregne med en spesifikk densitetsverdi. "xxxx" representerer valgt væsketetthet. Ferskvann: 997 kg/m³ | Sjøvann: 1029 kg/m³ |
997 |
!Dxx.xx\r\n |
Reservet kommando for dybdeoffset-justering. "xx.xx" er et flyttalls-offset. |
0 |
!Txx.xx\r\n |
Reservet kommando for temperatur-offset. "xx.xx" er et flyttalls-offset. |
0 |
!!\r\n |
Stopper sensorutdata midlertidig. Serien sender alle parametere. | Ingen |
!R\r\n |
Tilbakestill prosessorkortet. | Ingen |
!r\r\n |
Gjenopprett alle standardinnstillinger. | Ingen |
!C\r\n |
Tøm alle offset-innstillinger. | Ingen |
!!\r\n):!D0.55 brukt på en måleverdi på -0.55 → Utgang = 0.00!D-0.10 brukt på en måleverdi på 0.10 → Utgang = 0.00!T1.00 brukt på 25.00 °C → Utgang = 26.00 °C!T-1.00 brukt på 25.00 °C → Utgang = 24.00 °C!Txx.xx\r\n ved referanse til en ekstern temperaturkilde.
Har sensoren et innebygd prosessorkort?
Ja. Sensoren inneholder et internt prosessorkort som samler inn trykk- og temperaturdata med 24-bits oppløsning, utfører temperaturkompensasjon og sender dybde- og temperaturverdier i sanntid via et TTL-serielt grensesnitt.
Kan ledningene forlenges?
Sensoren bruker TTL-seriell kommunikasjon, som ikke er ideelt for lange kabelstrekk. Hvis forlengelse er nødvendig, bruk en nivåomformer for å konvertere til RS-232 eller RS-485 for å redusere bitfeilrate (BER).
Krever sensoren kalibrering? Hvilke data sendes via seriellporten?
Sensoren sender ferdig beregnede dybde- og temperaturverdier direkte over seriell. Kalibrering kan utføres ved overflaten om ønskelig, men dataene er allerede prosessert og krever ingen ekstra dekoding eller kompensasjon.
Hva om metalldiaphragma blir ripet eller bulket?
Hvis membranen blir deformert – for eksempel av verktøyskader eller groper – skal den ikke brukes, da dette kan påvirke både datanøyaktighet og tetningsintegritet.
Kan jeg trykke på sensoren med fingeren for å teste den?
Nei. Manuelt trykk er ujevnt og kan deformere den følsomme metalldiaphragmaen, spesielt ved bruk av negler. Unngå all direkte trykktesting.
Er den direkte kompatibel med ArduSub?
Nei, sensoren bruker TTL-seriell utgang og er ikke plug-and-play med ArduSub-systemer. Integrasjon krever tilpasset firmware eller ekstra grensesnitt.