












Concebido para precisão e fácil integração, o Sensor de Temperatura da Água Submarino M10 fornece medições digitais de temperatura fiáveis em ambientes subaquáticos exigentes. Utiliza um elemento de deteção TSYS01 para alcançar uma precisão de ±0,1 °C no intervalo típico de –5 a 50 °C, mantendo estabilidade num intervalo alargado de –40 °C a 125 °C.
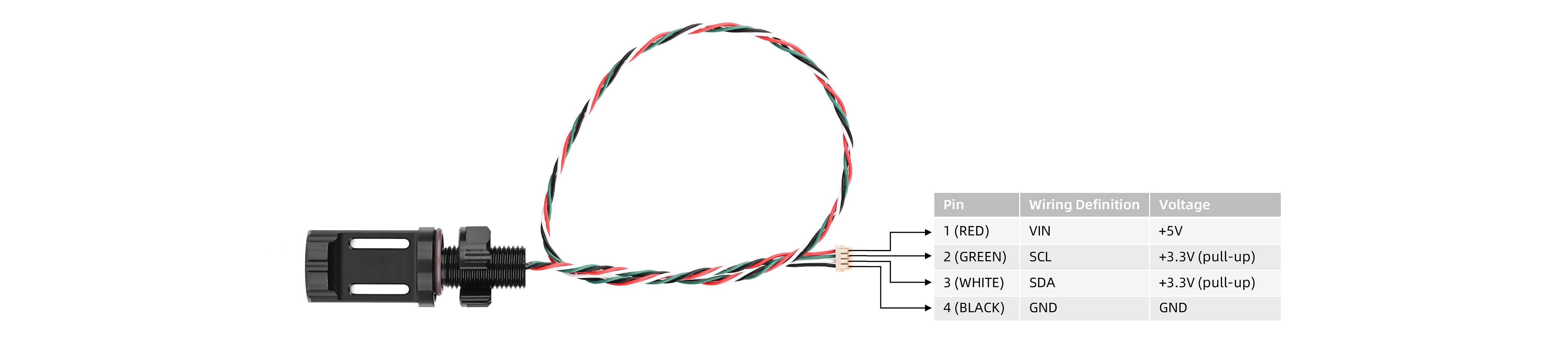
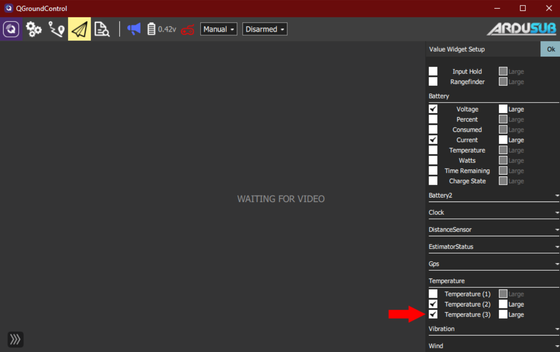
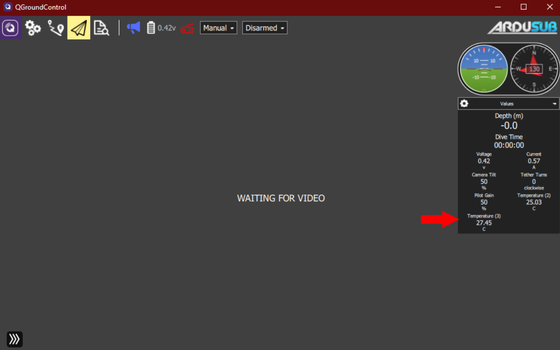
Pré-calibrado para utilização imediata, o sensor transmite os dados de temperatura via I²C utilizando coeficientes de calibração integrados, eliminando a necessidade de processamento manual. Liga-se diretamente a sistemas Pixhawk através de um conector DF13-4S-1.25C e de uma interface I²C padrão de 4 fios, assegurando uma integração simples com as plataformas ArduSub e QGroundControl.
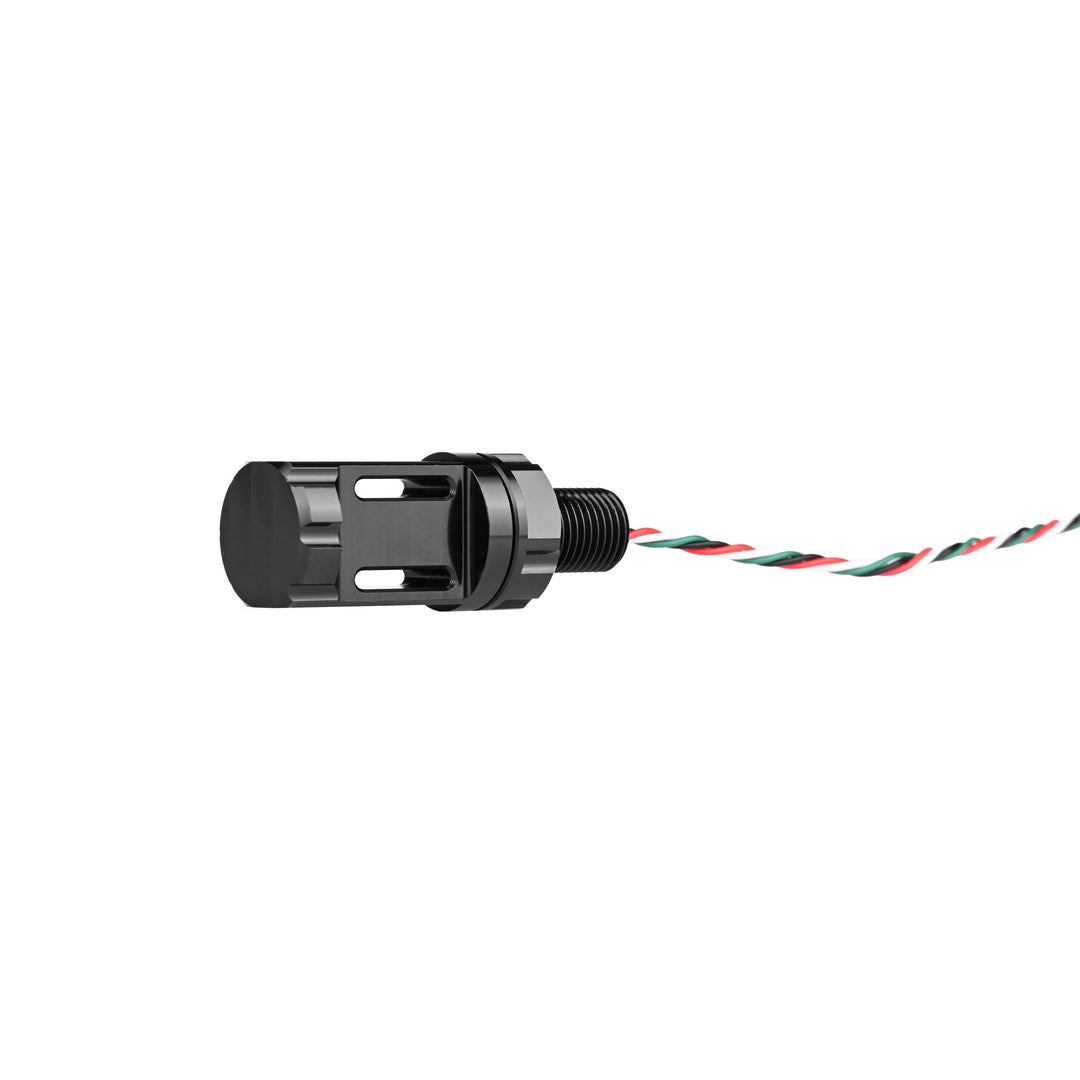
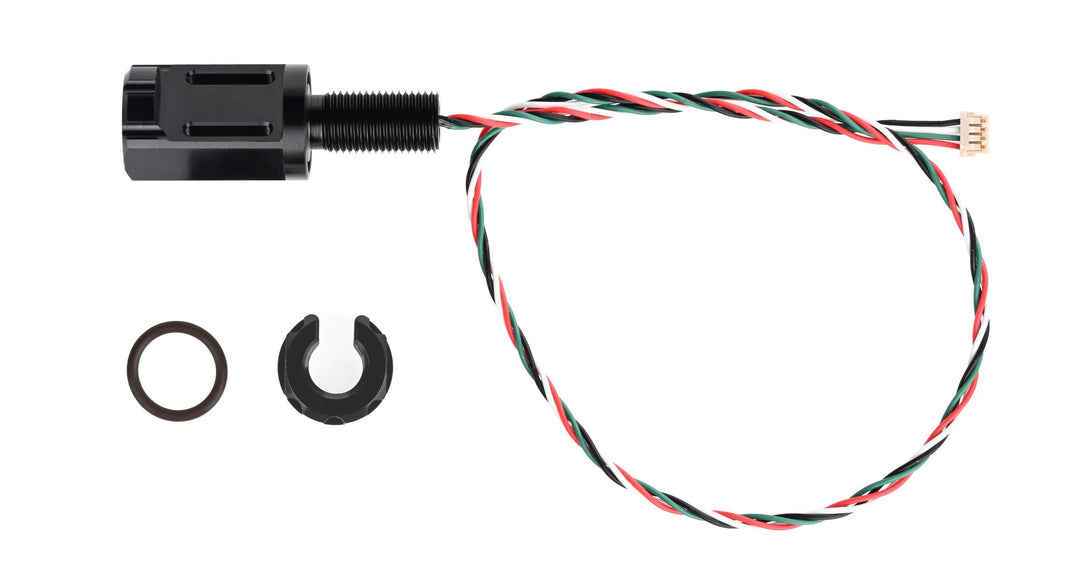
O corpo em alumínio com rosca M10 simplifica a instalação em caixas subaquáticas ou anteparas. Internamente encapsulado com epóxi termicamente condutor, o sensor oferece tempos de resposta rápidos, protegendo simultaneamente a eletrónica contra pressão e humidade a profundidades até 1 000 m.
Para percursos de cabo mais longos ou múltiplos dispositivos I²C, a integridade do sinal pode ser melhorada através da utilização de resistências pull-up mais fortes ou de chips de repetição I²C. O sensor é também adequado para aplicações em ar, oferecendo uma utilização flexível tanto em sistemas subaquáticos como de superfície.


O Sensor submarino de temperatura da água M10 integra-se facilmente nos boîtiers submarinos Blu-Sub utilizando uma porta de montagem roscada M10 padrão. Cada boîtier garante vedação adequada e suporte mecânico para medições precisas de temperatura em profundidade. Confirme que existe espaço interno suficiente e espessura de painel adequada para o corpo do sensor e o conector.
Boîtier estanque submarino
Boîtier compacto em alumínio com índice de profundidade de 300 m, pré-perfurado com vinte portas M10 — ideal para integração direta de sensores roscados M10, como este sensor de temperatura. Não requer modificações.
Tubo de boîtier submarino em acrílico
Tubo transparente em acrílico fundido com índice de profundidade de 250 m, compatível com embouts Blu-Sub em alumínio ou acrílico. Selecione embouts com portas de montagem M10 para suportar o sensor de temperatura de forma segura.
Tubo de boîtier submarino em alumínio
Boîtier em alumínio com elevada classificação de profundidade de 1 000 m. Utilize com embouts correspondentes em alumínio ou acrílico com portas de montagem M10 para uma instalação segura do sensor de temperatura em condições submarinas de alta pressão.

Este produto pode ser instalado utilizando a Chave de instalação universal M8/M10, uma ferramenta dedicada concebida para componentes Blu-Sub de estilo passante M8 e M10, como penetradores, interruptores, sensores e hardware do tipo conector.
O seu design compacto de dupla extremidade permite a instalação em espaços apertados ou com componentes próximos, enquanto as ranhuras para passagem de cabos permitem que a chave deslize sobre cabos já ligados, possibilitando a instalação ou manutenção sem necessidade de desligar a cablagem.
O Tubo de Acoplamento Submarino M10 oferece uma solução de montagem externa para o sensor de temperatura da água quando a instalação direta numa caixa não é viável. Proporciona espaço interno para a cablagem e pode ser selado com epóxi para manter a estanquidade e proteger as ligações. Ideal para configurações modulares de ROV ou AUV, onde a acessibilidade do sensor e a gestão otimizada dos cabos são essenciais.

| Especificação | Sensor de Temperatura da Água Submarino M10 |
|---|---|
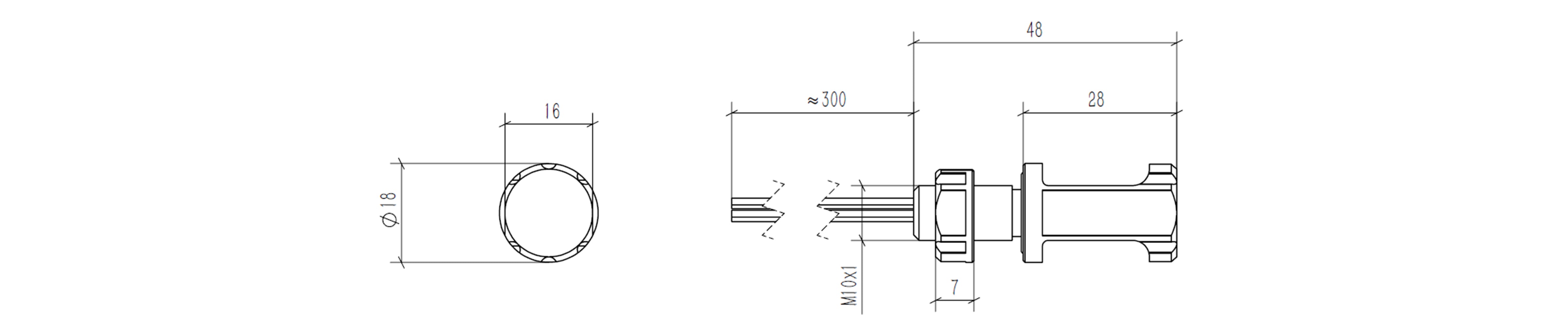
| Rosca | M10×1 |
| Material | Alumínio anodizado preto |
| Peso | 19,5 g |
| Tensão | 5 V |
| Níveis lógicos I²C (SCL/SDA) | 3,3 V |
| Definição da cablagem | Vermelho: VIN; Verde: SCL; Branco: SDA; Preto: GND |
| Endereço I²C | 0x77 |
| Comprimento do cabo | Aprox. 300 mm |
| Tipo de conector | DF13-4S-1.25C |
| Temperatura de funcionamento | -40 ~ 125 °C |
| Precisão absoluta | ±0,1 °C (−5 ~ 50 °C) ±0,5 °C (−40 ~ 125 °C) |
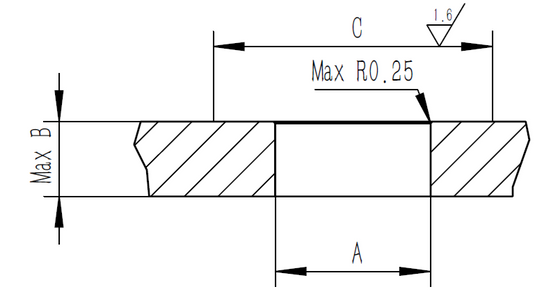
| Dimensão Recomendada | Sensor de Temperatura da Água |
|---|---|
| Dimensão recomendada do orifício passante do painel (A) | Ø10,1 ± 0,1 |
| Espessura da tampa (B) | 13 mm |
| Alcance de superfície (C) | 20 mm |

Pode ser utilizado no ar?
Sim, o sensor pode ser utilizado no ar sem qualquer problema.
O cabo pode ser prolongado?
Se o cabo for demasiado longo ou se existirem vários dispositivos no barramento I²C, podem ocorrer problemas de temporização. Para mitigar esta situação, reduza o valor da resistência pull-up ou utilize uma pull-up mais forte. Também pode ser adicionado um repetidor I²C ou um chip de relé para aumentar de forma fiável a distância do cabo.
O facto de o sensor estar dentro de um corpo roscado afeta o tempo de resposta da temperatura?
O corpo em alumínio foi concebido para ser o mais fino possível e é preenchido com epóxi de elevada condutividade térmica para melhorar o tempo de resposta. Esta configuração minimiza o atraso térmico.
O sensor de temperatura necessita de calibração? Que dados são fornecidos pela interface I²C?
O sensor inclui coeficientes de calibração de fábrica. Fornece dados ADC de 24 bits via I²C, sendo a temperatura obtida através da aplicação desses coeficientes. Os detalhes completos e as instruções de implementação estão disponíveis no manual do sensor para transferência.










