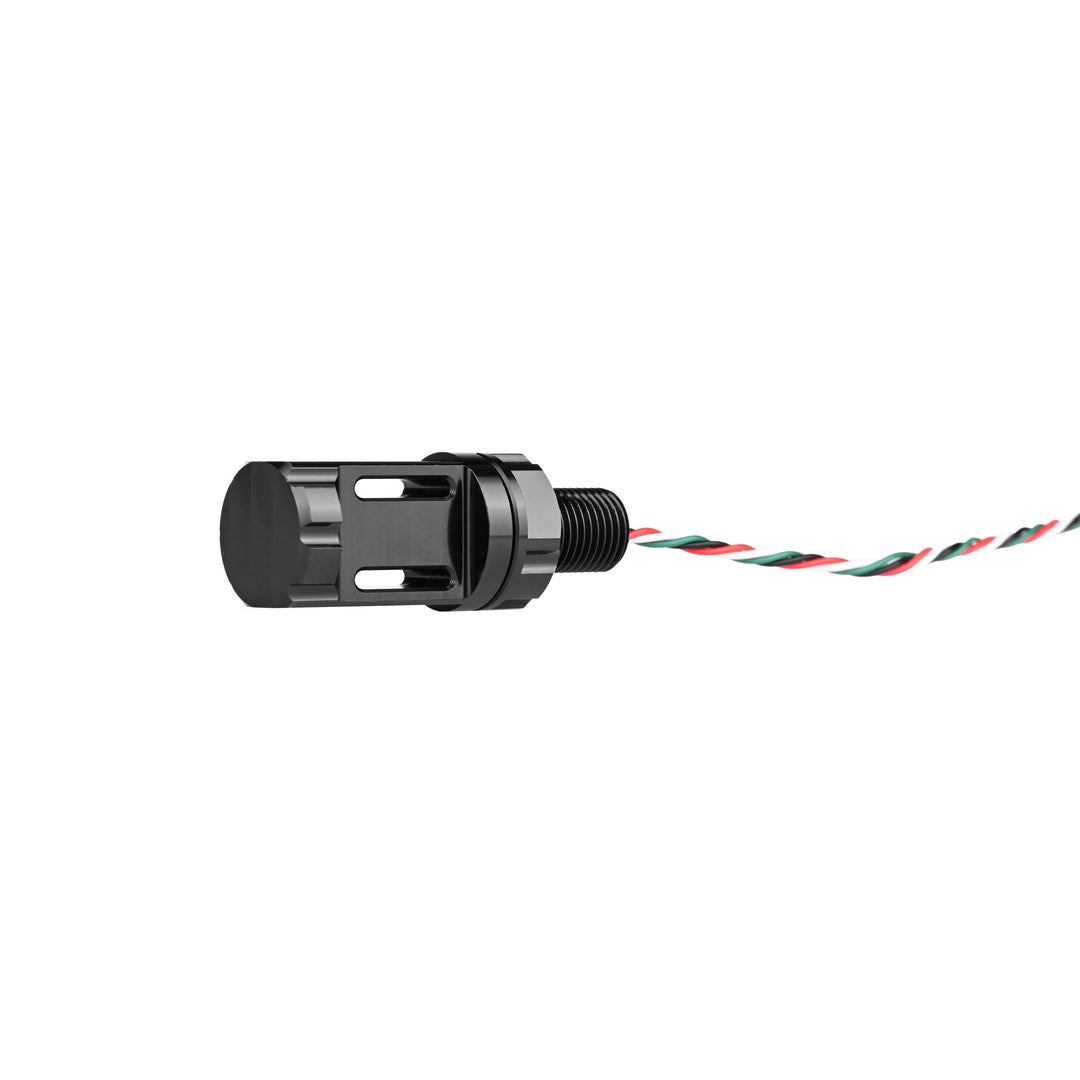













Progettato per garantire precisione e facilità di integrazione, il sensore di temperatura dell'acqua Subsea M10 fornisce misure digitali accurate della temperatura in ambienti sottomarini difficili. Utilizza un elemento di rilevamento TSYS01 per ottenere un'accuratezza di ±0,1 °C nell'intervallo tipico da -5 a 50 °C e mantiene la stabilità in un ampio intervallo esteso da -40 °C a 125 °C.
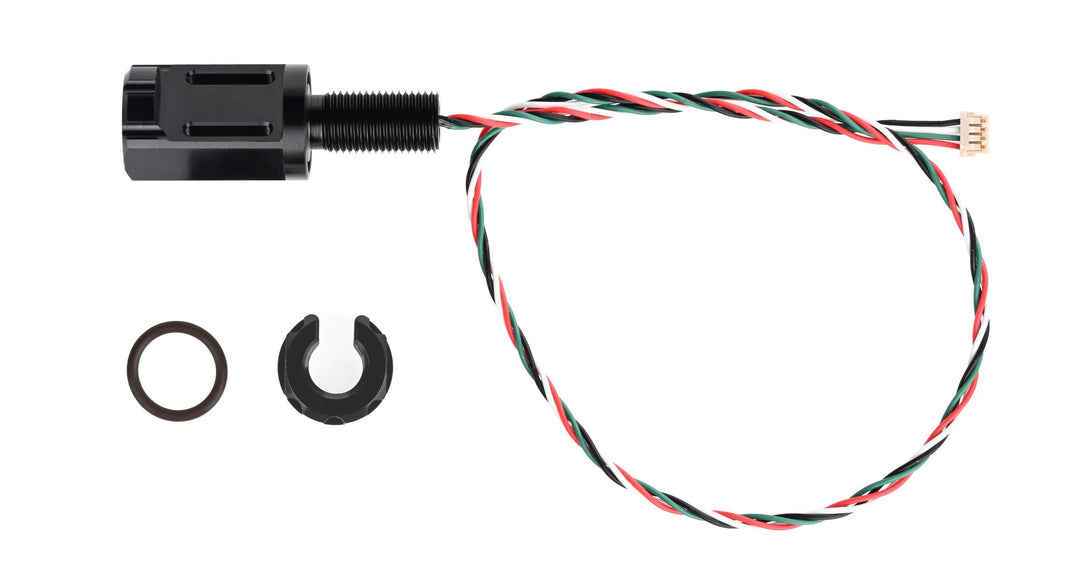
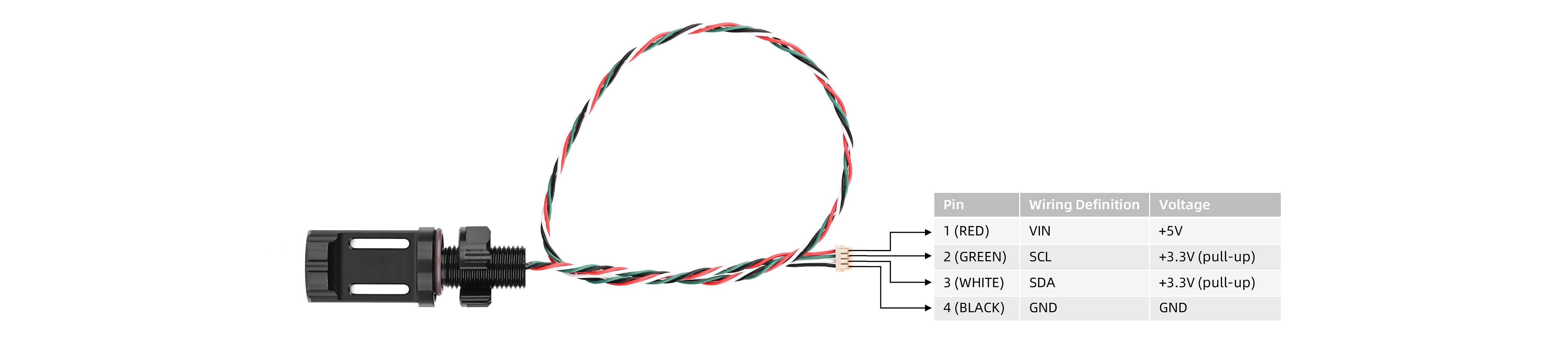
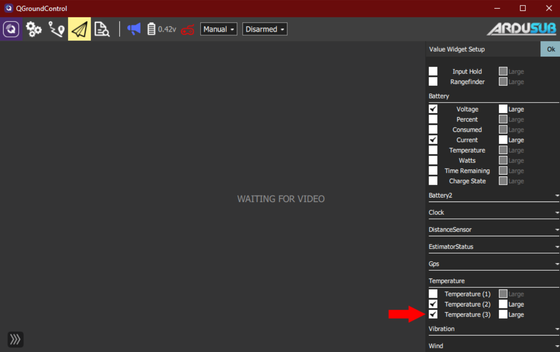
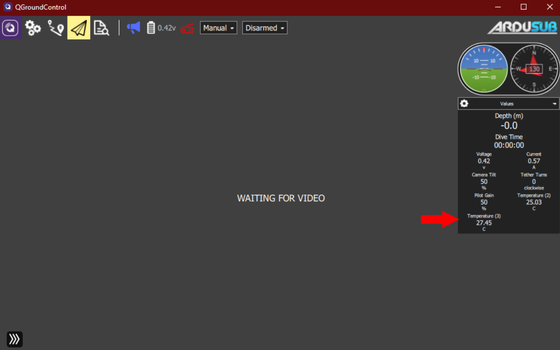
Pre-calibrato per l'uso immediato, il sensore fornisce i dati di temperatura via I²C utilizzando i coefficienti di calibrazione integrati, eliminando la necessità di un'elaborazione manuale. Si collega direttamente ai sistemi Pixhawk tramite un connettore DF13-4S-1,25C e un'interfaccia I²C standard a 4 fili, supportando una perfetta integrazione con le piattaforme ArduSub e QGroundControl.
L'alloggiamento in alluminio con filettatura M10 semplifica l'installazione in custodie o paratie sottomarine. Invasato internamente con resina epossidica termoconduttiva, il sensore offre tempi di risposta rapidi e protegge l'elettronica dalla pressione e dall'umidità fino a 1.000 metri di profondità.
Per i cavi più lunghi o per i dispositivi I²C multipli, l'integrità del segnale può essere migliorata utilizzando resistenze di pull-up più forti o chip di relè I²C. Il sensore è adatto anche per applicazioni in aria, offrendo un impiego flessibile sia nei sistemi subacquei che in quelli di superficie.


Il sensore di temperatura dell'acqua Subsea M10 si integra facilmente nelle custodie Blu-Sub utilizzando una porta di montaggio filettata M10 standard. Ogni custodia garantisce un'adeguata tenuta e un supporto meccanico per un rilevamento accurato della temperatura in profondità. Verificare che lo spazio interno e lo spessore del pannello siano adatti al corpo e al connettore del sensore.
Scatola di custodia impermeabile sottomarina
Custodia compatta in alluminio resistente a 300 m, preforata con venti porte M10, ideale per l'integrazione diretta di sensori con filettatura M10 come questo sensore di temperatura. Non sono necessarie modifiche.
Tubo acrilico della custodia sottomarina
Tubo acrilico fuso trasparente fino a 250 m, compatibile con i tappi terminali Blu-Sub in alluminio o acrilico. Scegliere tappi terminali con porte di montaggio M10 per sostenere il sensore di temperatura in modo sicuro.
Custodia sottomarina in alluminio
Custodia in alluminio per profondità fino a 1.000 m. Utilizzabile con i tappi terminali in alluminio o acrilico dotati di porte di montaggio M10 per l'impiego sicuro del sensore di temperatura in condizioni di alta pressione sottomarina.

Questo prodotto può essere installato utilizzando la chiave di installazione universale M8/M10, uno strumento dedicato ai componenti Blu-Sub M8 e M10 a paratia, come penetratori, interruttori, sensori e connettori.
Il suo design compatto a doppia estremità consente l'installazione in layout stretti o a distanza ravvicinata, mentre le fessure per il passaggio dei cavi consentono alla chiave di scorrere sui cavi preassemblati, consentendo l'installazione o la manutenzione senza scollegare il cablaggio.
Iltubo di accoppiamento M10 Subsea offre una soluzione di montaggio esterno per il sensore di temperatura dell'acqua quando non è possibile l'installazione diretta in una custodia. Offre spazio interno per il cablaggio e può essere sigillato con resina epossidica per mantenere l'integrità dell'acqua e proteggere le connessioni. Ideale per le costruzioni modulari di ROV o AUV in cui l'accessibilità del sensore e il passaggio dei cavi sono fondamentali.

| Specifiche tecniche | Sensore di temperatura dell'acqua sottomarino M10 |
|---|---|
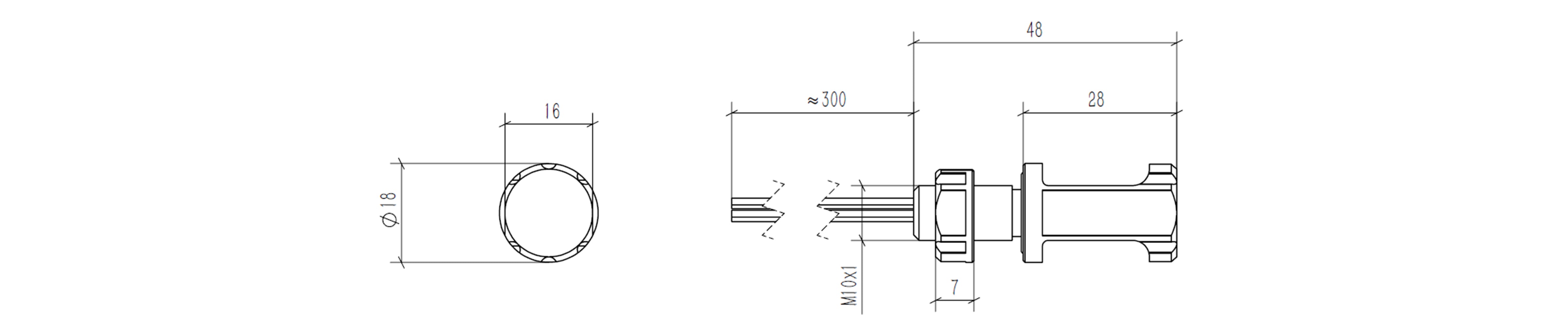
| Filettatura | M10×1 |
| Materiale | Alluminio anodizzato nero |
| Peso | 19.5 g |
| Tensione | 5 V |
| Livelli logici IIC (SCL/SDA) | 3.3 V |
| Definizione del cablaggio | Rosso: VIN; Verde: SCL; Bianco: SDA; nero: GND |
| Indirizzo IIC | 0x77 |
| Lunghezza del filo | Circa 300 mm |
| Tipo di connettore | DF13-4S-1,25C |
| Temperatura di funzionamento | -40 ~ 125 ℃ |
| Precisione assoluta | ±0.1 ℃ (-5 ~ 50 ℃) ±0.5 ℃ (-40 ~ 125 ℃) |
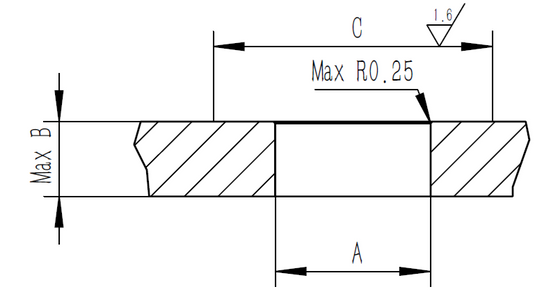
| Dimensioni consigliate | Sensore di temperatura dell'acqua |
|---|---|
| Dimensioni consigliate del foro passante della paratia (A) | Ø10.1 ± 0.1 |
| Spessore del coperchio del boccaporto (B) | 13 mm |
| Superficie (C) | 20 mm |

Posso utilizzarlo in aria?
Sì, il sensore può essere utilizzato in aria senza problemi.
Il cavo può essere allungato?
Se il cavo è troppo lungo o se sono presenti più dispositivi sul bus I²C, possono verificarsi problemi di temporizzazione. Per attenuare questo problema, ridurre il valore della resistenza di pull-up o utilizzare un pull-up forte. Per estendere la distanza del cavo in modo affidabile, è possibile aggiungere un ripetitore I²C o un chip relè.
La presenza del sensore all'interno di una custodia filettata influisce sul tempo di risposta alla temperatura?
L'alloggiamento in alluminio è stato progettato per essere il più sottile possibile ed è riempito con resina epossidica ad alta conducibilità termica per migliorare il tempo di risposta. Questa configurazione riduce al minimo il ritardo termico.
Il sensore di temperatura richiede una calibrazione? Quali dati sono forniti dall'interfaccia I²C?
Il sensore include i coefficienti di calibrazione di fabbrica. Emette dati ADC a 24 bit tramite I²C e la temperatura si ottiene applicando questi coefficienti. I dettagli completi e le istruzioni di implementazione sono disponibili nel manuale del sensore scaricabile.










