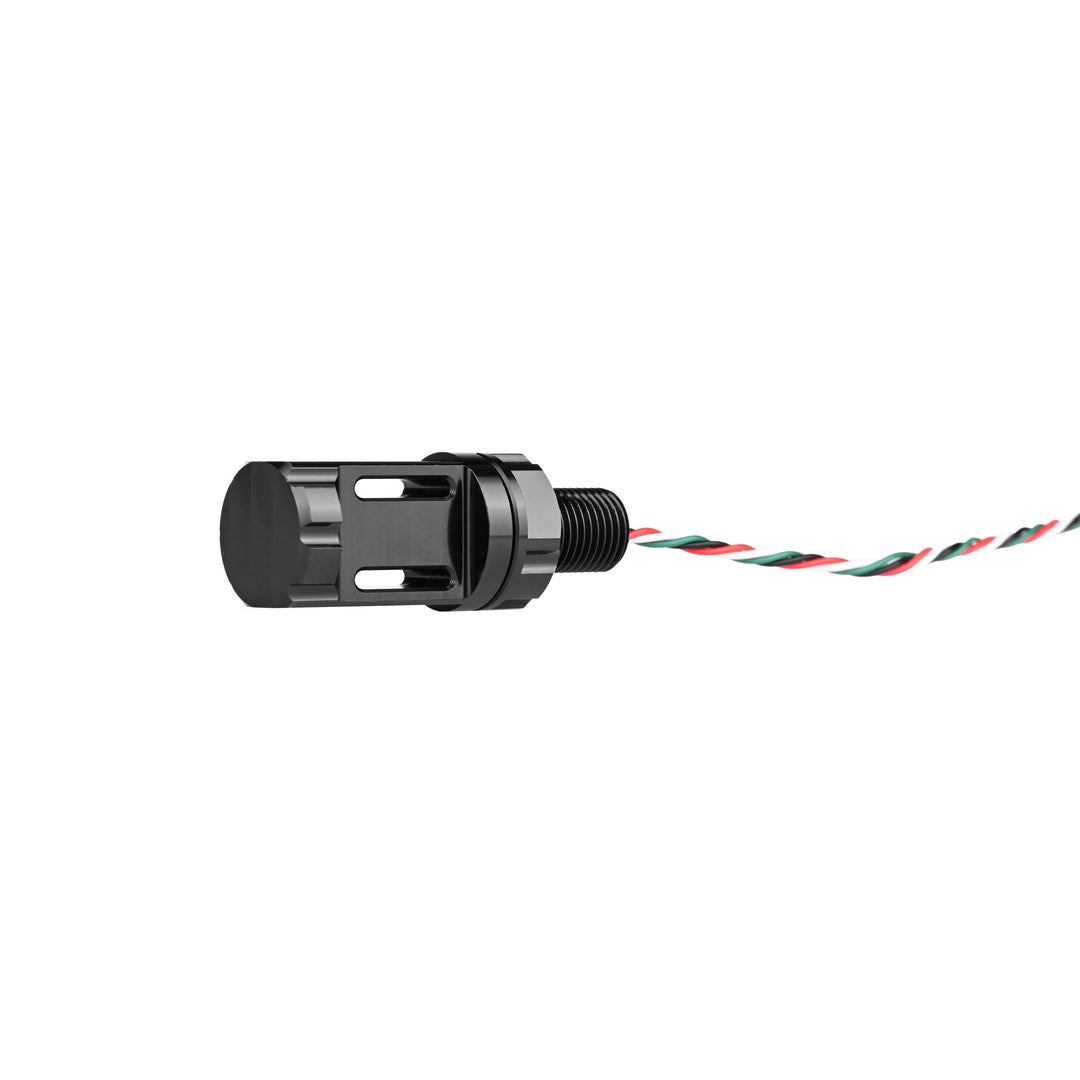













정밀성과 손쉬운 통합을 위해 설계된 Subsea M10 수온 센서는 까다로운 수중 환경에서 정확한 디지털 온도 측정을 제공합니다. TSYS01 센싱 소자를 사용하여 –5~50 °C의 일반적인 범위에서 ±0.1 °C의 정확도를 달성하며, –40 °C부터 125 °C까지의 확장된 범위에서도 안정적인 성능을 유지합니다.
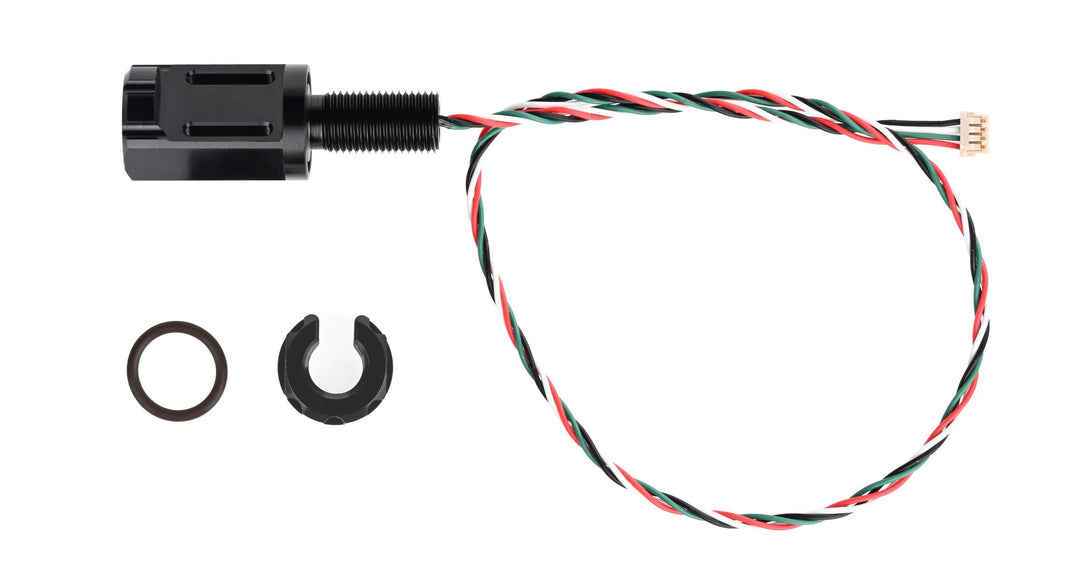
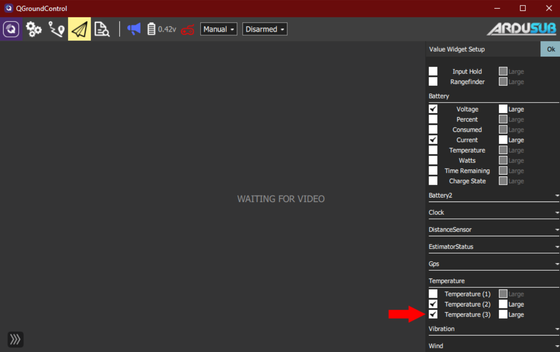
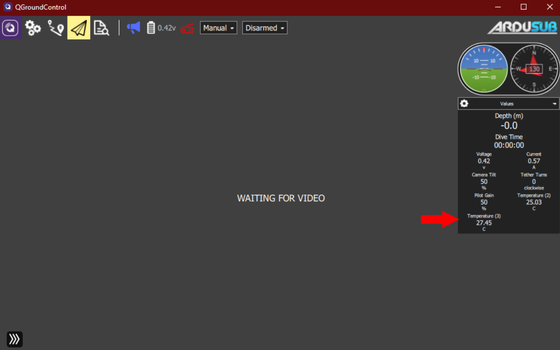
즉시 사용 가능하도록 사전 보정된 이 센서는 내장된 보정 계수를 활용해 I²C로 온도 데이터를 출력하므로 수동 처리 과정이 필요 없습니다. DF13-4S-1.25C 커넥터와 표준 4선식 I²C 인터페이스를 통해 Pixhawk 시스템에 직접 연결되며, ArduSub 및 QGroundControl 플랫폼과의 원활한 통합을 지원합니다.
M10 나사산이 적용된 알루미늄 하우징은 수중 인클로저 또는 벌크헤드에 간편하게 설치할 수 있도록 설계되었습니다. 내부는 열전도 에폭시로 포팅 처리되어 빠른 응답 속도를 제공하는 동시에, 최대 1,000 m 수심에서 압력과 습기로부터 전자 부품을 보호합니다.
더 긴 케이블 길이나 여러 I²C 장치를 사용하는 경우, 더 강한 풀업 저항이나 I²C 릴레이 칩을 사용하여 신호 무결성을 개선할 수 있습니다. 또한 이 센서는 공기 중 환경에서도 사용 가능하여 수중 및 지상 시스템 전반에 걸쳐 유연한 적용이 가능합니다.


Subsea M10 수온 센서는 표준 M10 나사형 장착 포트를 사용하여 Blu-Sub 해저 인클로저에 쉽게 통합할 수 있습니다. 각 인클로저는 수심 환경에서 정확한 온도 측정을 위한 적절한 밀봉과 기계적 지지를 제공합니다. 센서 본체와 커넥터에 적합한 내부 여유 공간과 패널 두께를 확인하십시오.
해저 방수 인클로저 박스
300 m 등급의 컴팩트한 알루미늄 하우징으로, 20개의 M10 포트가 사전 가공되어 있어 이 온도 센서와 같은 M10 나사형 센서를 직접 통합하는 데 이상적입니다. 별도의 수정이 필요하지 않습니다.
해저 인클로저 아크릴 튜브
250 m 등급의 투명 주조 아크릴 튜브로, Blu-Sub 알루미늄 또는 아크릴 엔드캡과 호환됩니다. 수온 센서를 안전하게 장착하려면 M10 장착 포트가 있는 엔드캡을 선택하십시오.
해저 인클로저 알루미늄 튜브
1,000 m 등급의 심해용 알루미늄 인클로저입니다. 고압 해저 환경에서 수온 센서를 안전하게 배치하려면 M10 장착 포트가 포함된 호환 알루미늄 또는 아크릴 엔드캡과 함께 사용하십시오.

이 제품은 범용 M8/M10 설치 렌치를 사용하여 설치할 수 있으며, 이는 페네트레이터, 스위치, 센서 및 커넥터형 하드웨어와 같은 Blu-Sub M8 및 M10 벌크헤드 구성품을 위해 설계된 전용 공구입니다.
컴팩트한 양쪽 끝 구조로 협소하거나 밀집된 공간에서도 설치가 가능하며, 케이블 통과 슬롯이 있어 이미 연결된 케이블 위로 렌치를 통과시킬 수 있어 배선을 분리하지 않고도 설치 또는 유지보수가 가능합니다.
Subsea M10 커플링 튜브는 인클로저에 직접 설치하기 어려운 경우 수온 센서를 외부에 장착할 수 있는 솔루션을 제공합니다. 내부에 배선을 수용할 수 있는 공간을 제공하며, 에폭시로 밀봉하여 방수 무결성을 유지하고 연결부를 보호할 수 있습니다. 센서 접근성과 깔끔한 케이블 라우팅이 중요한 모듈형 ROV 또는 AUV 시스템에 이상적입니다.

| 사양 | Subsea M10 수온 센서 |
|---|---|
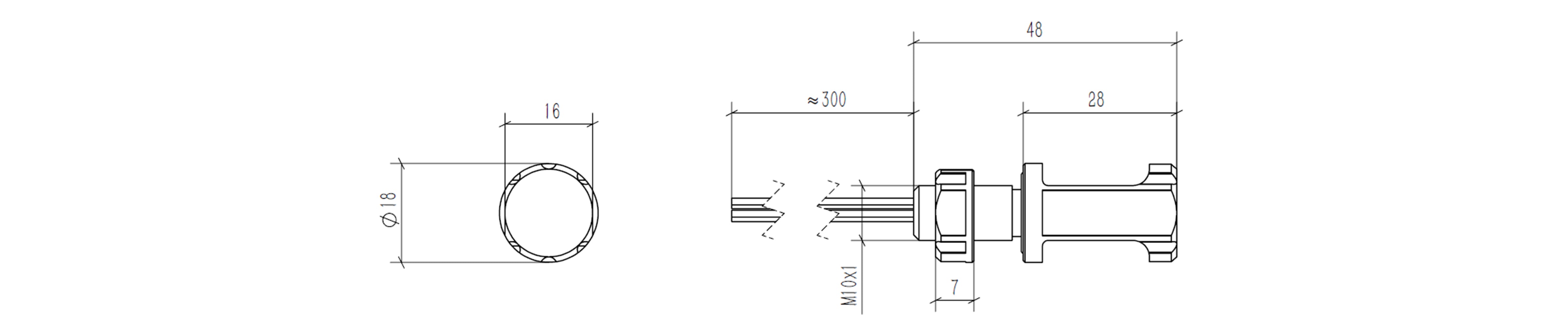
| 나사 규격 | M10×1 |
| 재질 | 블랙 아노다이징 알루미늄 |
| 무게 | 19.5 g |
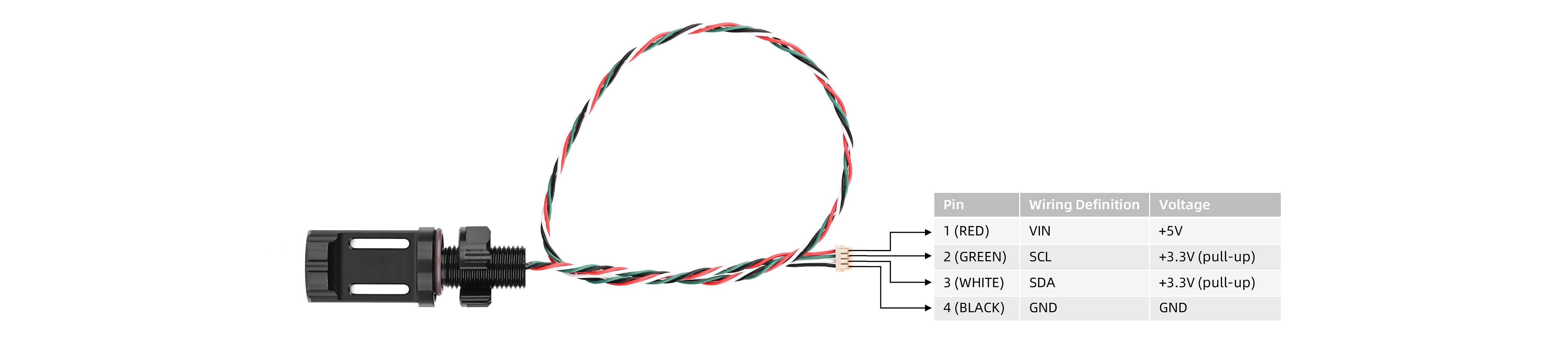
| 전압 | 5 V |
| I²C 로직 레벨 (SCL/SDA) | 3.3 V |
| 배선 정의 | 적색: VIN; 녹색: SCL; 흰색: SDA; 검정: GND |
| I²C 주소 | 0x77 |
| 케이블 길이 | 약 300 mm |
| 커넥터 유형 | DF13-4S-1.25C |
| 동작 온도 | -40 ~ 125 ℃ |
| 절대 정확도 | ±0.1 ℃ (−5 ~ 50 ℃) ±0.5 ℃ (−40 ~ 125 ℃) |
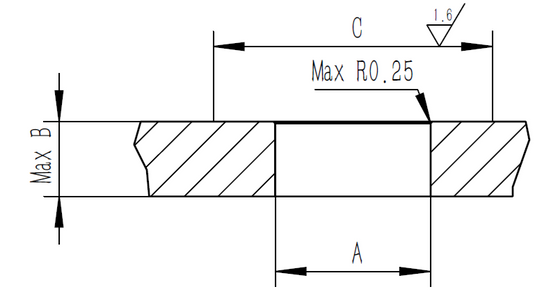
| 권장 치수 | 수온 센서 |
|---|---|
| 권장 벌크헤드 관통 홀 크기 (A) | Ø10.1 ± 0.1 |
| 해치 커버 두께 (B) | 13 mm |
| 표면 범위 (C) | 20 mm |

공기 중에서도 사용할 수 있나요?
네, 이 센서는 공기 중 환경에서도 문제없이 사용할 수 있습니다.
케이블을 연장할 수 있나요?
케이블 길이가 길거나 I²C 버스에 여러 장치가 연결된 경우 타이밍 문제가 발생할 수 있습니다. 이를 완화하기 위해 풀업 저항 값을 낮추거나 더 강한 풀업을 사용하는 것이 좋습니다. 또한 I²C 리피터 또는 릴레이 칩을 추가하면 케이블 거리를 안정적으로 연장할 수 있습니다.
나사형 하우징 내부에 장착되면 온도 응답 속도에 영향을 주나요?
알루미늄 하우징은 가능한 한 얇게 설계되었으며, 응답 속도를 개선하기 위해 고열전도 에폭시로 충진되어 있습니다. 이러한 구조는 열 지연을 최소화합니다.
온도 센서는 보정이 필요한가요? I²C 인터페이스를 통해 어떤 데이터가 제공되나요?
이 센서에는 공장 출고 시 보정 계수가 포함되어 있습니다. I²C를 통해 24비트 ADC 데이터를 출력하며, 해당 보정 계수를 적용해 온도를 계산합니다. 자세한 내용과 구현 방법은 다운로드 가능한 센서 매뉴얼에서 확인할 수 있습니다.










