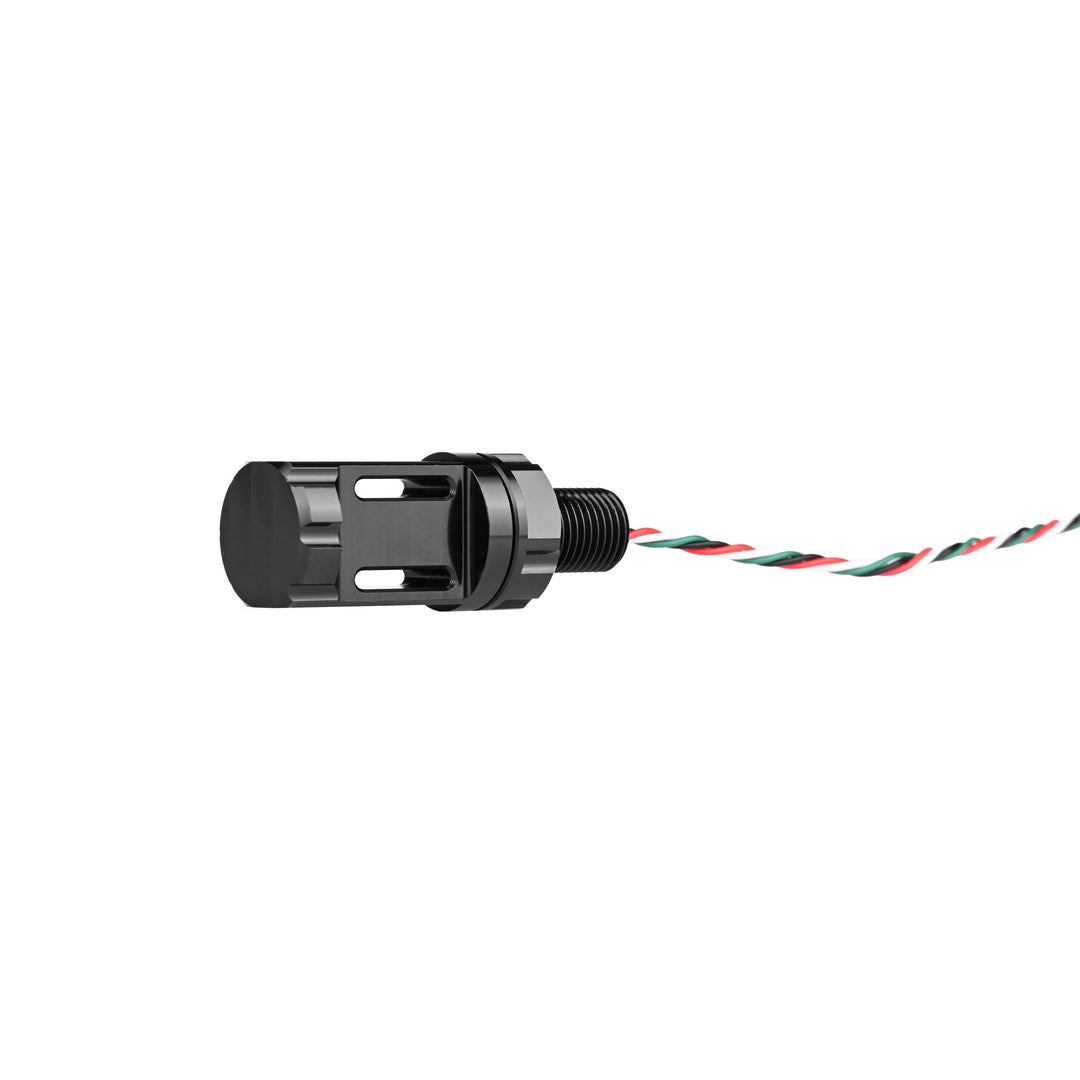













Zaprojektowany z myślą o precyzji i łatwej integracji czujnik temperatury wody Subsea M10 zapewnia dokładne cyfrowe pomiary temperatury w trudnych warunkach podwodnych. Wykorzystuje on element czujnikowy TSYS01, aby osiągnąć dokładność ±0,1°C w typowym zakresie od –5 do 50°C oraz zachowuje stabilność w szerokim, rozszerzonym zakresie od –40°C do 125°C.
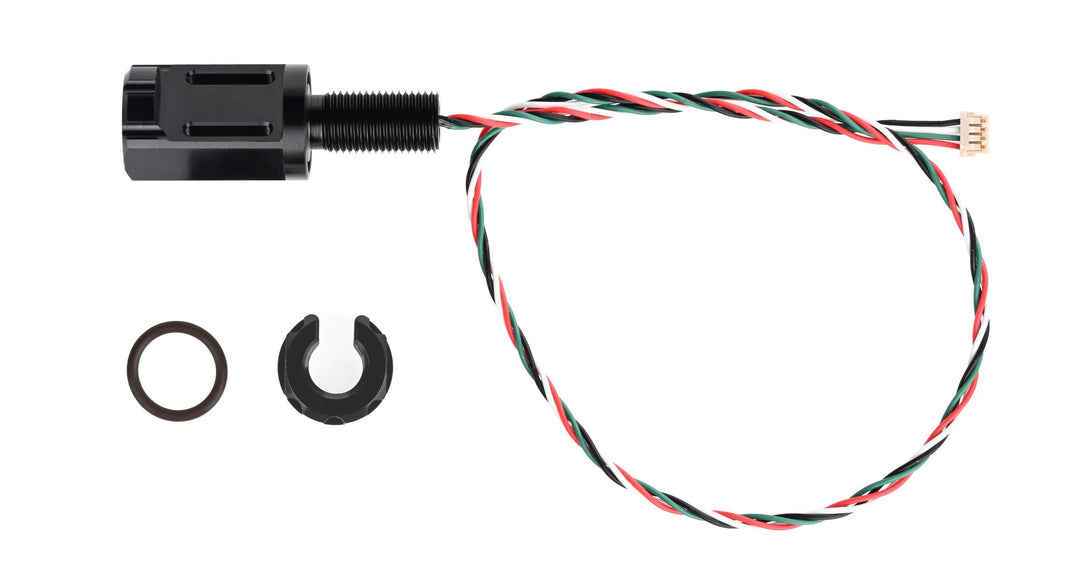
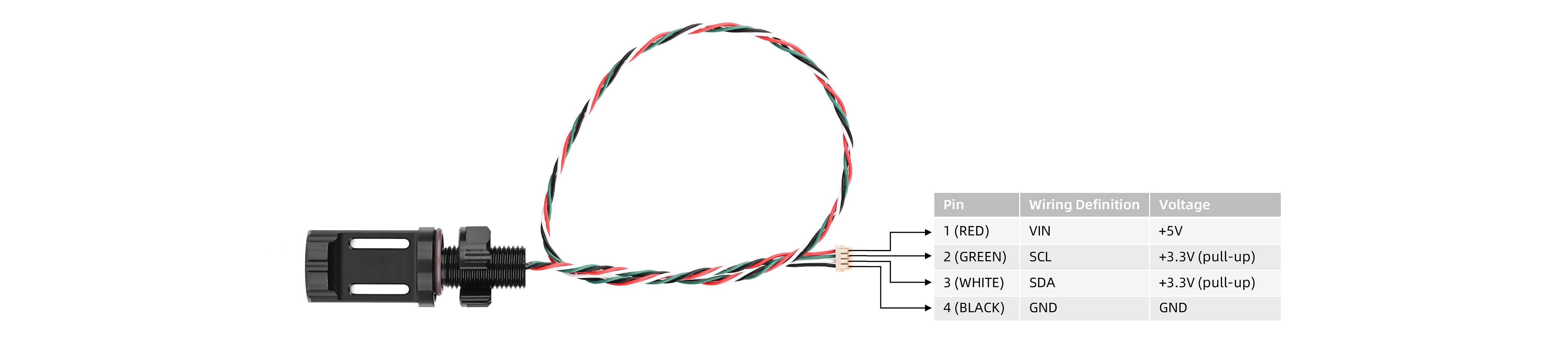
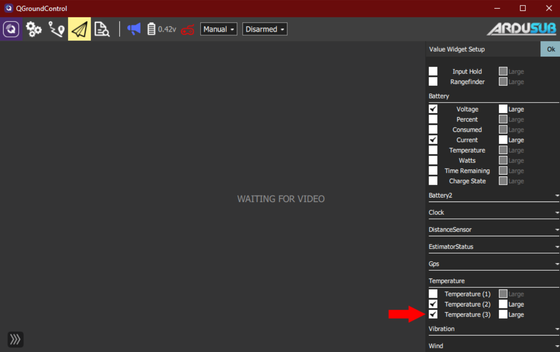
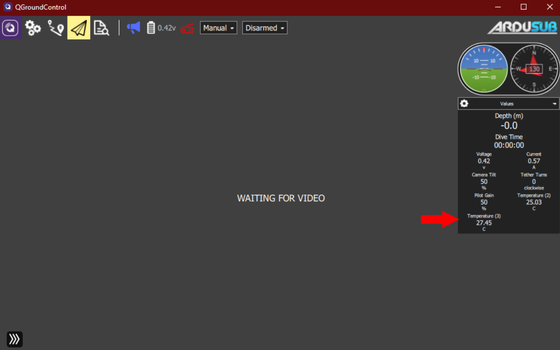
Czujnik jest wstępnie skalibrowany do natychmiastowego użytku i wysyła dane temperatury przez I²C przy użyciu wbudowanych współczynników kalibracyjnych — co eliminuje potrzebę ręcznego przetwarzania. Łączy się bezpośrednio z systemami Pixhawk poprzez złącze DF13-4S-1.25C i standardowy 4-przewodowy interfejs I²C, wspierając płynną integrację z platformami ArduSub i QGroundControl.
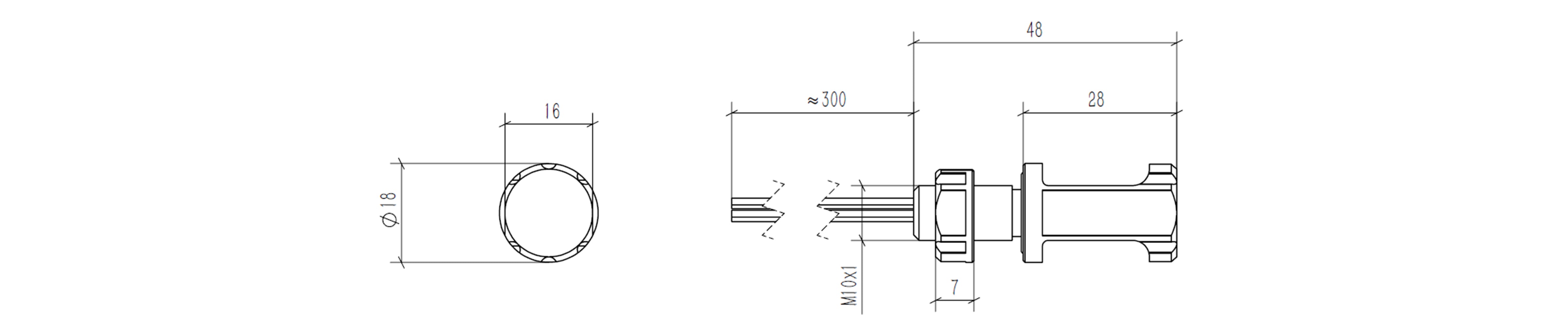
Aluminiowa obudowa z gwintem M10 ułatwia montaż w obudowach podwodnych lub przegrodach. Czujnik, wypełniony wewnątrz termoprzewodzącą żywicą epoksydową, zapewnia szybki czas reakcji, jednocześnie chroniąc elektronikę przed ciśnieniem i wilgocią na głębokościach do 1000 metrów.
W przypadku dłuższych przebiegów kabli lub wielu urządzeń I²C integralność sygnału można poprawić, stosując silniejsze rezystory podciągające lub układy przekaźnikowe I²C. Czujnik nadaje się również do zastosowań powietrznych, oferując elastyczne wdrożenie zarówno w systemach podwodnych, jak i powierzchniowych.


Podwodny czujnik temperatury wody M10 można łatwo zamontować w podwodnych obudowach Blu-Sub za pomocą standardowego gwintowanego otworu montażowego M10. Każda obudowa zapewnia odpowiednie uszczelnienie i wsparcie mechaniczne, umożliwiające dokładny pomiar temperatury na głębokości. Należy upewnić się, że wewnętrzna przestrzeń i grubość panelu są odpowiednie dla korpusu czujnika i złącza.
Podwodna, wodoszczelna obudowa
Kompaktowa aluminiowa obudowa przystosowana do głębokości 300 m, z dwudziestoma nawierconymi otworami M10 — idealna do bezpośredniej integracji czujników z gwintem M10, takich jak ten czujnik temperatury. Nie wymaga żadnych modyfikacji.
Podwodna obudowa z rurką akrylową
Przezroczysta rura z odlewanego akrylu przystosowana do głębokości 250 m, kompatybilna z aluminiowymi lub akrylowymi zaślepkami Blu-Sub. Wybierz zaślepki z otworami montażowymi M10, aby bezpiecznie zamocować czujnik temperatury.
Rura aluminiowa do obudowy podwodnej
Obudowa aluminiowa przystosowana do głębokości 1000 m. Należy stosować z dopasowanymi aluminiowymi lub akrylowymi zaślepkami wyposażonymi w otwory montażowe M10 w celu bezpiecznego rozmieszczenia czujnika temperatury w warunkach wysokiego ciśnienia podwodnego.

Produkt ten można zamontować za pomocą uniwersalnego klucza montażowego M8/M10 firmy – specjalistycznego narzędzia przeznaczonego do elementów typu przelotowego Blu-Sub M8 i M10, takich jak przepusty, przełączniki, czujniki oraz elementy złączeniowe.
Jego kompaktowa konstrukcja z dwoma końcami umożliwia montaż w ciasnych lub ściśle rozmieszczonych układach, a szczeliny do przepuszczania kabli pozwalają na nasunięcie klucza na wcześniej podłączone kable, umożliwiając montaż lub serwisowanie bez odłączania okablowania.
Rurka łącząca Subsea M10 firmy stanowi rozwiązanie do montażu zewnętrznego czujnika temperatury wody w sytuacjach, gdy bezpośredni montaż w obudowie nie jest możliwy. Zapewnia ona wewnętrzną przestrzeń na okablowanie i może zostać uszczelniona żywicą epoksydową w celu zachowania wodoszczelności oraz ochrony połączeń. Idealnie nadaje się do modułowych konstrukcji pojazdów ROV lub AUV, gdzie dostęp do czujników i optymalne poprowadzenie kabli mają kluczowe znaczenie.

| Specyfikacja | Podwodny czujnik temperatury wody M10 |
|---|---|
| Gwint | M10×1 |
| Materiał | Aluminium anodowane na czarno |
| Waga | 19,5 g |
| Napięcie | 5 V |
| Poziomy logiczne IIC (SCL/SDA) | 3,3 V |
| Oznaczenia przewodów | Czerwony: VIN; Zielony: SCL; Biały: SDA; Czarny: GND |
| Adres IIC | 0x77 |
| Długość przewodu | Około 300 mm |
| Typ złącza | DF13-4S-1.25C |
| Temperatura pracy | -40 ~ 125 ℃ |
| Dokładność bezwzględna | ±0,1 °C (−5 ~ 50 °C) ±0,5 °C (−40 ~ 125 °C) |
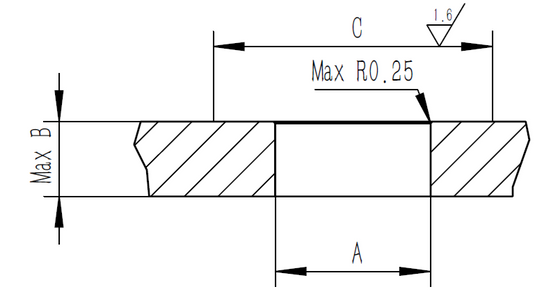
| Zalecany rozmiar | Czujnik temperatury wody |
|---|---|
| Zalecany rozmiar otworu przelotowego w przegrodzie (A) | Ø10,1 ± 0,1 |
| Grubość pokrywy luku (B) | 13 mm |
| Zakres powierzchni (C) | 20 mm |

Czy mogę go używać w powietrzu?
Tak, czujnik może być bez problemu używany w powietrzu.
Czy można przedłużyć kabel?
Jeśli kabel jest zbyt długi lub na magistrali I²C znajduje się wiele urządzeń, mogą wystąpić problemy z synchronizacją. Aby temu zapobiec, należy zmniejszyć wartość rezystora podciągającego lub zastosować silny rezystor podciągający. Można również dodać repeater I²C lub układ przekaźnikowy, aby niezawodnie wydłużyć odległość kabla.
Czy umieszczenie czujnika w obudowie z gwintem wpływa na czas reakcji na temperaturę?
Aluminiowa obudowa została zaprojektowana tak, aby była jak najcieńsza, i jest wypełniona żywicą epoksydową o wysokiej przewodności cieplnej w celu poprawy czasu reakcji. Taka konstrukcja minimalizuje opóźnienie termiczne.
Czy czujnik temperatury wymaga kalibracji? Jakie dane są dostarczane przez interfejs I²C?
Czujnik zawiera fabryczne współczynniki kalibracyjne. Przesyła 24-bitowe dane z przetwornika analogowo-cyfrowego (ADC) przez interfejs I²C, a temperatura jest obliczana na podstawie tych współczynników. Pełne szczegóły i instrukcje wdrożeniowe są dostępne w instrukcji obsługi czujnika, którą można pobrać.










