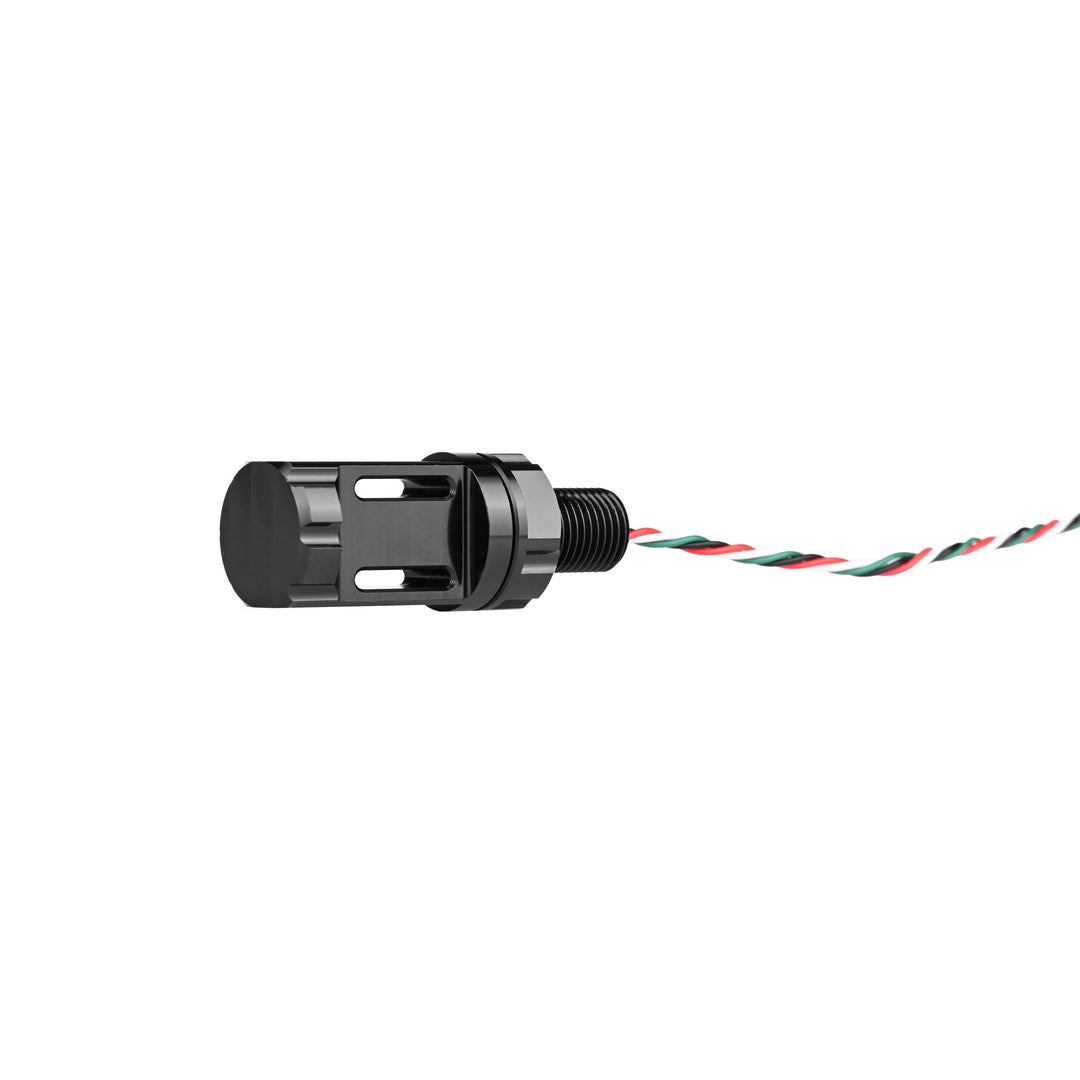













Der Unterwasser-Temperatursensor M10 wurde für Präzision und einfache Integration entwickelt und liefert genaue digitale Temperaturmessungen in anspruchsvollen Unterwasserumgebungen. Er verwendet ein TSYS01-Messelement, um eine Genauigkeit von ±0,1 °C im typischen Bereich von –5 bis 50 °C zu erreichen, und bleibt über den erweiterten Bereich von –40 °C bis 125 °C stabil.
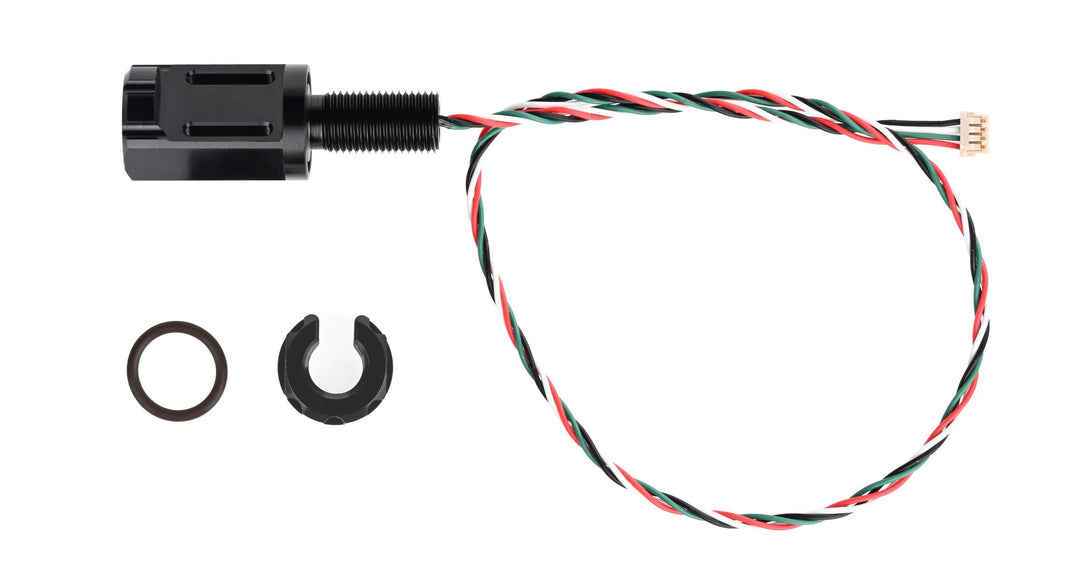
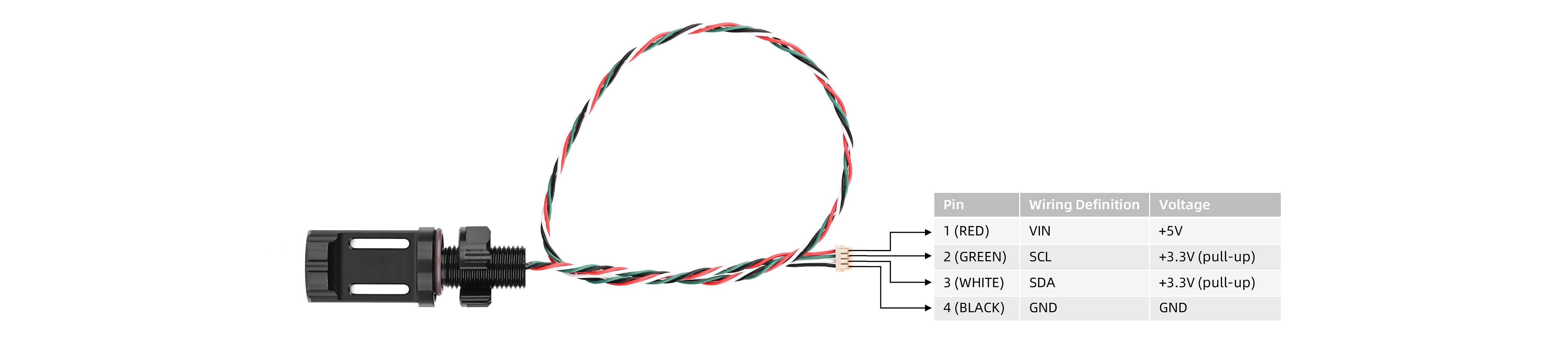
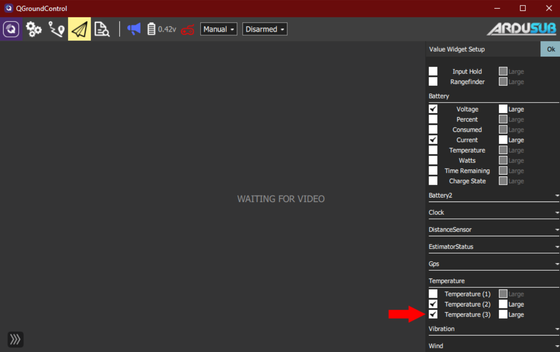
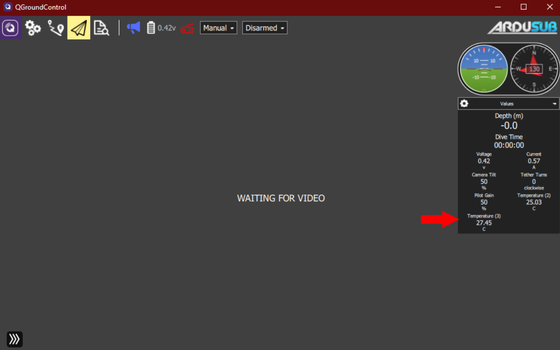
Der Sensor ist werkseitig kalibriert und sofort einsatzbereit. Er gibt Temperaturdaten über I²C mit integrierten Kalibrierkoeffizienten aus, wodurch eine manuelle Verarbeitung entfällt. Über einen DF13-4S-1.25C-Stecker und eine standardmäßige 4-adrige I²C-Schnittstelle kann er direkt an Pixhawk-Systeme angeschlossen werden und ermöglicht eine nahtlose Integration mit ArduSub- und QGroundControl-Plattformen.
Das M10-Gehäuse aus Aluminium mit Gewinde vereinfacht die Installation in Unterwassergehäusen oder Durchführungen. Innen mit wärmeleitendem Epoxid vergossen, bietet der Sensor kurze Reaktionszeiten und schützt die Elektronik vor Druck und Feuchtigkeit in Tiefen bis zu 1 000 Metern.
Für längere Kabelstrecken oder mehrere I²C-Geräte kann die Signalqualität durch stärkere Pull-up-Widerstände oder I²C-Relaischips verbessert werden. Der Sensor eignet sich auch für luftgestützte Anwendungen und bietet flexible Einsatzmöglichkeiten sowohl unter Wasser als auch an der Oberfläche.


Der Subsea M10 Water Temperature Sensor lässt sich über einen standardmäßigen M10-Gewindeanschluss einfach in Blu-Sub-Unterwassergehäuse integrieren. Jedes Gehäuse gewährleistet eine ordnungsgemäße Abdichtung und mechanische Abstützung für eine präzise Temperaturmessung in der Tiefe. Stellen Sie sicher, dass ausreichend Innenraum und Wandstärke für den Sensorkörper und den Anschluss vorhanden sind.
Subsea Watertight Enclosure Box
Kompaktes Aluminiumgehäuse mit einer Tiefenbewertung von 300 m, vorgebohrt mit zwanzig M10-Anschlüssen – ideal für die direkte Integration von Sensoren mit M10-Gewinde wie diesem Temperatursensor. Keine Modifikation erforderlich.
Subsea Enclosure Acrylic Tube
Transparenter Rohrkörper aus gegossenem Acryl mit einer Tiefenbewertung von 250 m, kompatibel mit Blu-Sub-Endkappen aus Aluminium oder Acryl. Wählen Sie Endkappen mit M10-Montageanschlüssen, um den Temperatursensor sicher zu befestigen.
Subsea Enclosure Aluminum Tube
Tiefenbewertetes Aluminiumgehäuse mit einer Tiefenbewertung von 1 000 m. Verwenden Sie es mit passenden Endkappen aus Aluminium oder Acryl, die über M10-Montageanschlüsse verfügen, um den Temperatursensor sicher unter Hochdruckbedingungen im Unterwasserbereich einzusetzen.

Dieses Produkt kann mit dem universellen M8/M10-Installationsschlüssel installiert werden, einem speziell entwickelten Werkzeug für Blu-Sub M8- und M10-Komponenten im Bulkhead-Stil wie Kabeldurchführungen, Schalter, Sensoren und Steckverbinder.
Sein kompaktes, beidseitiges Design ermöglicht die Installation in engen oder dicht angeordneten Bereichen, während Kabeldurchführungsöffnungen es erlauben, den Schlüssel über bereits angeschlossene Kabel zu schieben, sodass Installation oder Wartung ohne Abklemmen der Verkabelung möglich ist.
Das Unterwasser-Kupplungsrohr M10 bietet eine externe Montagemöglichkeit für den Wassertemperatursensor, wenn eine direkte Installation in ein Gehäuse nicht möglich ist. Es verfügt über einen Innenraum für die Verkabelung und kann mit Epoxidharz abgedichtet werden, um die Wasserdichtigkeit zu gewährleisten und die Verbindungen zu schützen. Ideal für modulare ROV- oder AUV-Konstruktionen, bei denen Sensorzugänglichkeit und eine saubere Kabelführung entscheidend sind.

| Spezifikation | Unterwasser-Temperatursensor M10 |
|---|---|
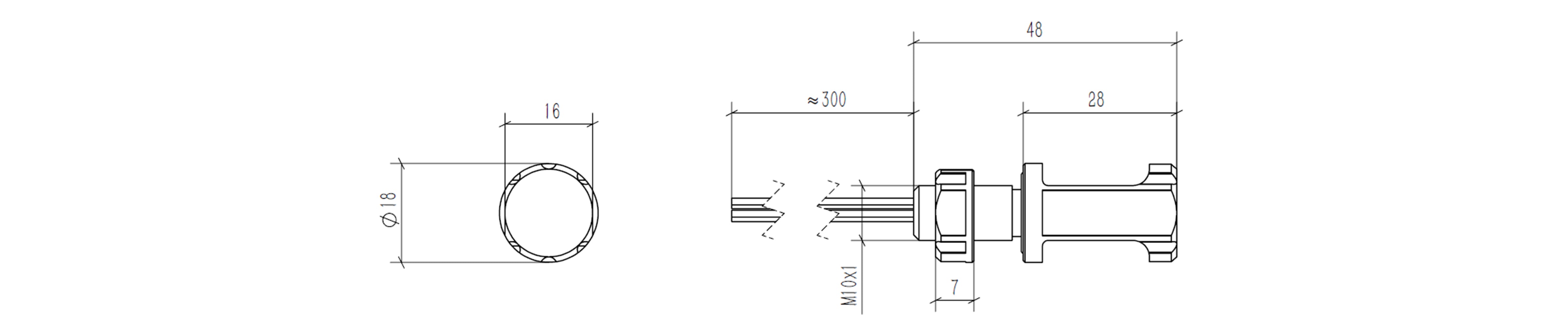
| Gewinde | M10×1 |
| Material | Aluminium, schwarz eloxiert |
| Gewicht | 19,5 g |
| Spannung | 5 V |
| I²C-Logikpegel (SCL/SDA) | 3,3 V |
| Leitungsbelegung | Rot: VIN; Grün: SCL; Weiß: SDA; Schwarz: GND |
| I²C-Adresse | 0x77 |
| Kabellänge | ca. 300 mm |
| Steckertyp | DF13-4S-1.25C |
| Betriebstemperatur | −40 ~ 125 °C |
| Absolute Genauigkeit | ±0,1 °C (−5 ~ 50 °C) ±0,5 °C (−40 ~ 125 °C) |
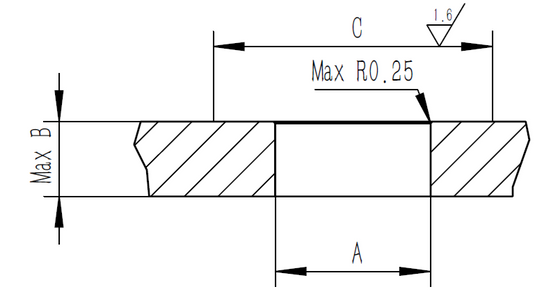
| Empfohlene Größe | Wassertemperatursensor |
|---|---|
| Empfohlene Durchgangsbohrung in der Wand (A) | Ø10,1 ± 0,1 |
| Abdeckungsdicke (B) | 13 mm |
| Oberflächenbereich (C) | 20 mm |

Kann er in der Luft verwendet werden?
Ja, der Sensor kann problemlos in der Luft verwendet werden.
Kann das Kabel verlängert werden?
Wenn das Kabel zu lang ist oder sich mehrere Geräte auf dem I²C-Bus befinden, können Timing-Probleme auftreten. Um dies zu vermeiden, sollte der Wert des Pull-up-Widerstands verringert oder ein stärkerer Pull-up verwendet werden. Alternativ kann ein I²C-Repeater oder Relaischip hinzugefügt werden, um die Kabellänge zuverlässig zu erweitern.
Beeinflusst das Gewindegehäuse die Ansprechzeit des Temperatursensors?
Das Aluminiumgehäuse ist so dünn wie möglich konstruiert und mit wärmeleitendem Epoxid gefüllt, um die Reaktionszeit zu verbessern. Diese Konstruktion minimiert die thermische Verzögerung.
Muss der Temperatursensor kalibriert werden? Welche Daten werden über die I²C-Schnittstelle bereitgestellt?
Der Sensor enthält werkseitig eingestellte Kalibrierkoeffizienten. Er gibt 24-Bit-ADC-Daten über I²C aus, und die Temperatur wird durch Anwendung dieser Koeffizienten berechnet. Ausführliche Informationen und Implementierungsanweisungen finden sich im herunterladbaren Sensormanual.










