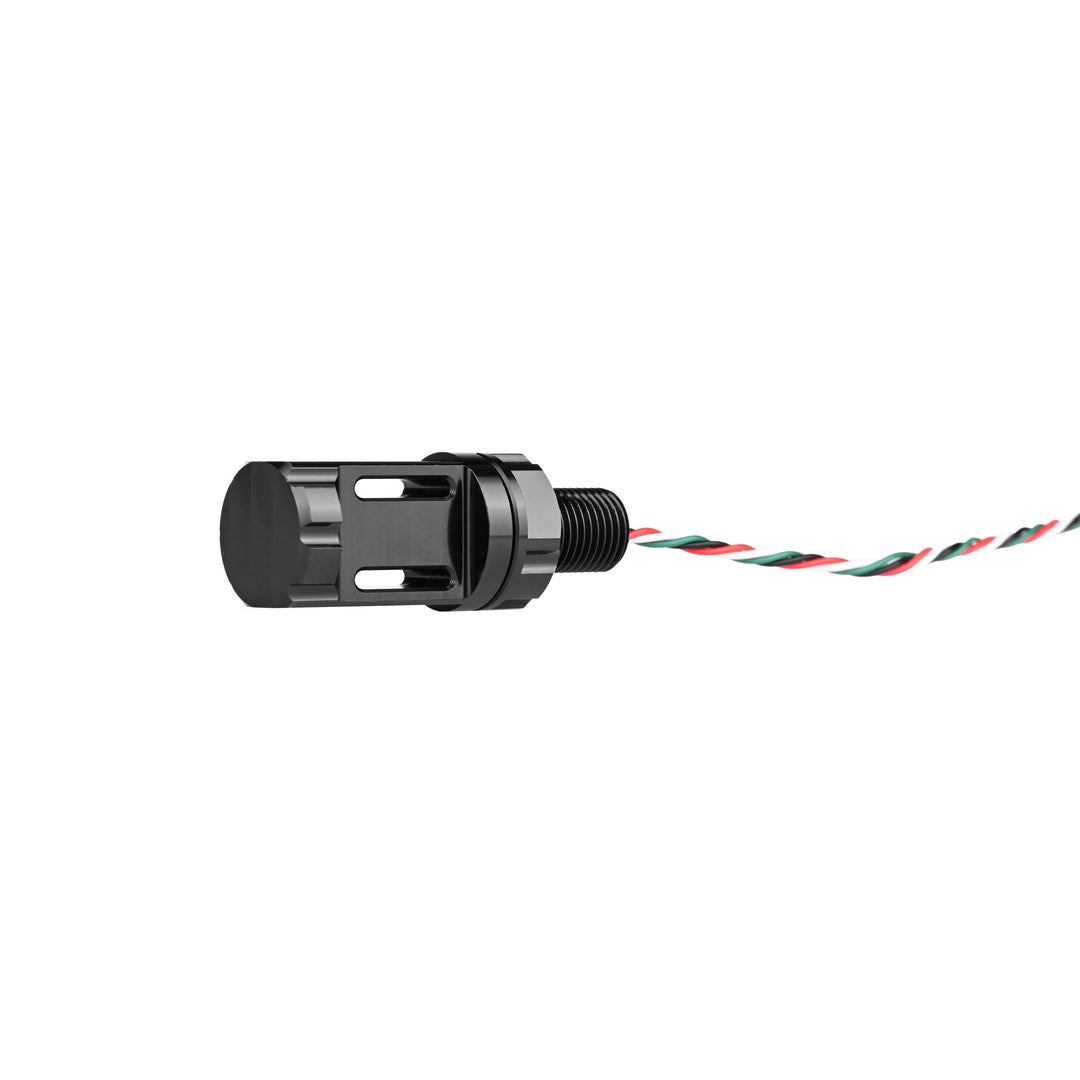













Diseñado para ofrecer precisión y una integración sencilla, el sensor de temperatura del agua M10 submarino proporciona mediciones digitales exactas en entornos submarinos exigentes. Utiliza un elemento sensor TSYS01 que alcanza una precisión de ±0,1 °C en el rango típico de –5 a 50 °C y mantiene su estabilidad en un amplio rango extendido de –40 °C a 125 °C.
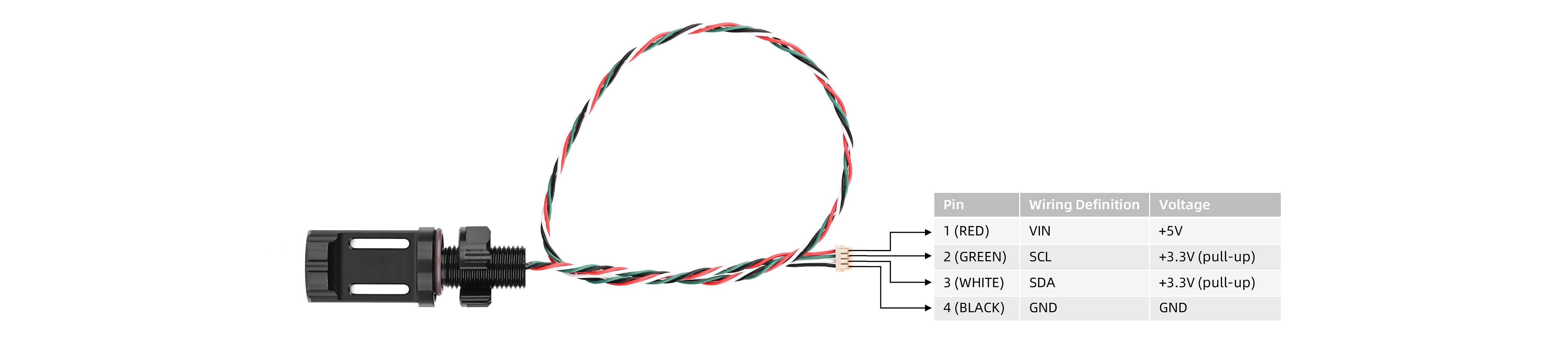
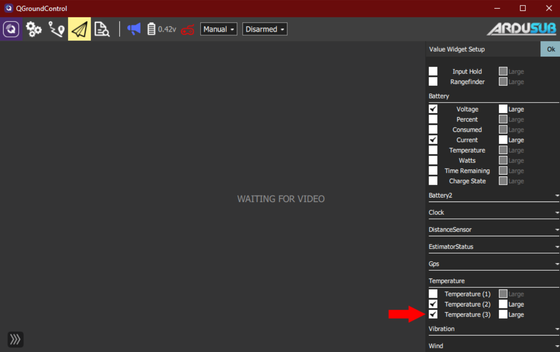
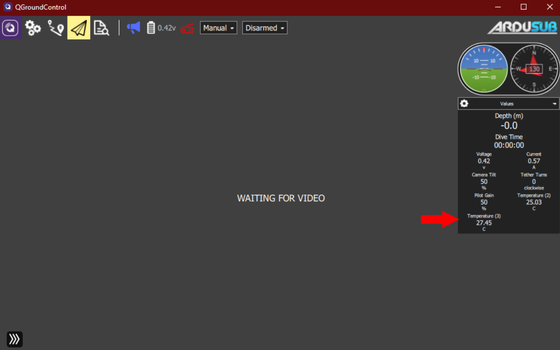
Precalibrado para un uso inmediato, el sensor transmite los datos de temperatura mediante I²C utilizando coeficientes de calibración integrados, lo que elimina la necesidad de procesamiento manual. Se conecta directamente a sistemas Pixhawk a través de un conector DF13-4S-1.25C y una interfaz I²C estándar de 4 hilos, garantizando una integración fluida con las plataformas ArduSub y QGroundControl.
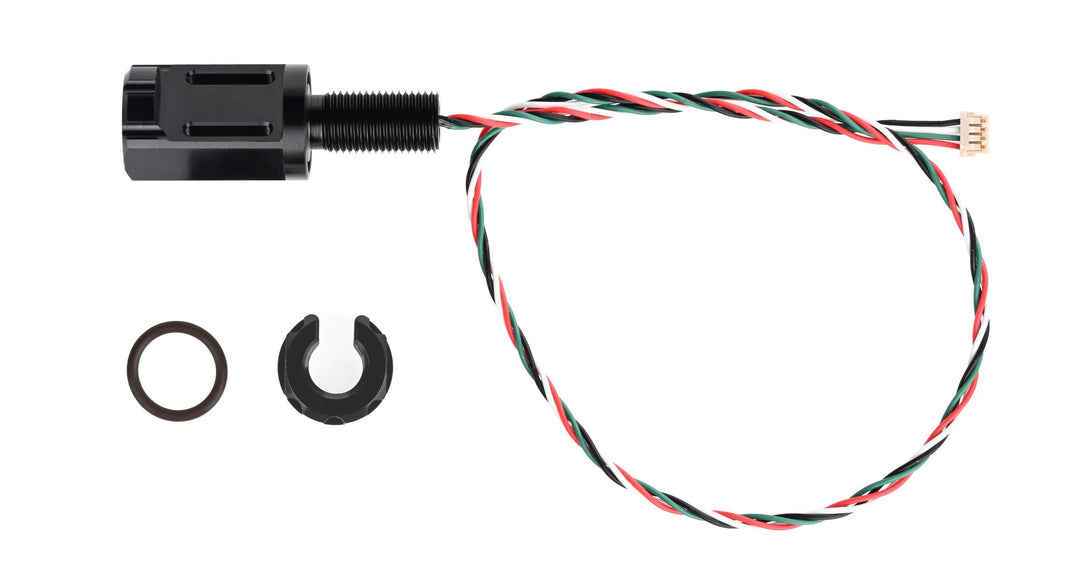
La carcasa de aluminio con rosca M10 facilita la instalación en carcasas o mamparos submarinos. Relleno internamente con resina epoxi termoconductora, el sensor ofrece tiempos de respuesta rápidos y protege la electrónica contra la presión y la humedad a profundidades de hasta 1 000 m.
Para recorridos de cable más largos o múltiples dispositivos I²C, la integridad de la señal puede mejorarse mediante resistencias pull-up más potentes o chips de relé I²C. El sensor también es adecuado para aplicaciones en superficie, ofreciendo una implementación flexible tanto en sistemas submarinos como aéreos.


El sensor submarino de temperatura del agua M10 se integra fácilmente en los boîtiers submarinos Blu-Sub mediante un puerto de montaje roscado M10 estándar. Cada boîtier garantiza un sellado adecuado y soporte mecánico para una medición precisa de la temperatura a profundidad. Verifique que el espacio interno y el grosor del panel sean adecuados para el cuerpo y el conector del sensor.
Boîtier estanco submarino
Boîtier compacto de aluminio con índice de profundidad de 300 m, preperforado con veinte puertos M10, ideal para la integración directa de sensores roscados M10 como este sensor de temperatura. No requiere modificaciones.
Tubo de boîtier acrílico submarino
Tubo transparente de acrílico fundido con índice de profundidad de 250 m, compatible con embouts de aluminio o acrílico Blu-Sub. Seleccione embouts con puertos de montaje M10 para fijar el sensor de temperatura de forma segura.
Tubo de boîtier de aluminio submarino
Boîtier de aluminio con índice de profundidad de 1 000 m. Utilícelo con embouts de aluminio o acrílico compatibles que incorporen puertos de montaje M10 para el despliegue seguro del sensor de temperatura en condiciones submarinas de alta presión.

Este producto puede instalarse utilizando la llave de instalación universal M8/M10, una herramienta dedicada diseñada para componentes Blu-Sub tipo mamparo M8 y M10, como penetradores, interruptores, sensores y hardware tipo conector.
Su diseño compacto de doble extremo permite la instalación en configuraciones ajustadas o con poco espacio, mientras que las ranuras para paso de cables permiten que la llave se deslice sobre cables ya conectados, facilitando la instalación o el mantenimiento sin necesidad de desconectar el cableado.
El tubo de acoplamiento M10 submarino ofrece una solución de montaje externo para el sensor de temperatura del agua cuando la instalación directa en una carcasa no es posible. Proporciona espacio interno para el cableado y puede sellarse con resina epoxi para mantener la estanqueidad y proteger las conexiones. Ideal para configuraciones modulares de ROV o AUV, donde la accesibilidad del sensor y una gestión de cables optimizada son esenciales.

| Especificación | Sensor de temperatura del agua M10 submarino |
|---|---|
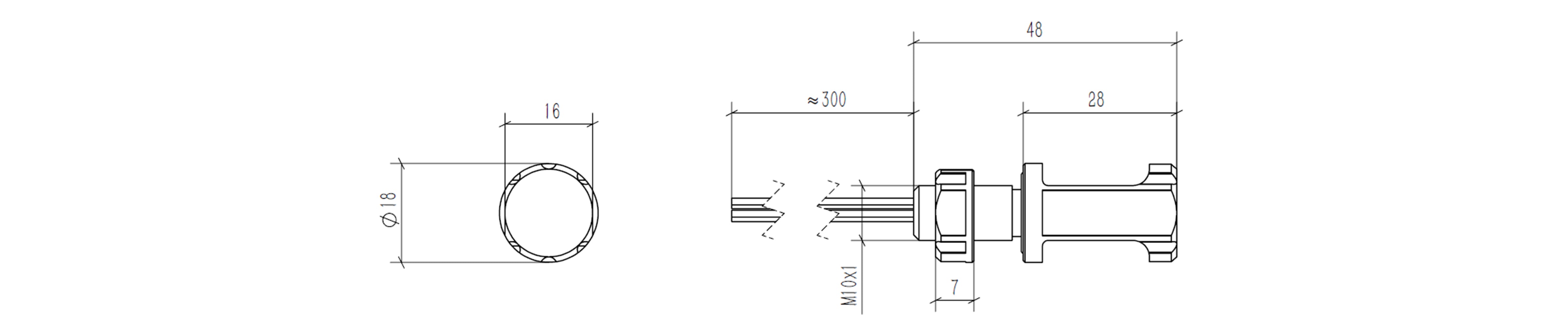
| Rosca | M10×1 |
| Material | Aluminio anodizado negro |
| Peso | 19,5 g |
| Voltaje | 5 V |
| Niveles lógicos I²C (SCL/SDA) | 3,3 V |
| Definición de cableado | Rojo: VIN; Verde: SCL; Blanco: SDA; Negro: GND |
| Dirección I²C | 0x77 |
| Longitud del cable | Aprox. 300 mm |
| Tipo de conector | DF13-4S-1.25C |
| Temperatura de funcionamiento | –40 ~ 125 °C |
| Precisión absoluta | ±0,1 °C (–5 ~ 50 °C) ±0,5 °C (–40 ~ 125 °C) |
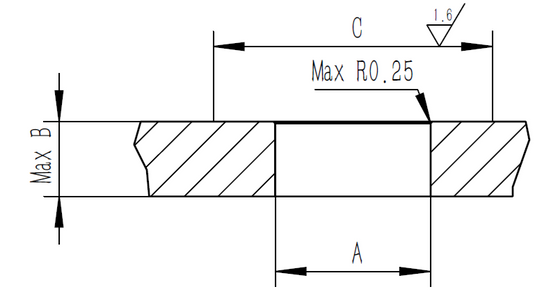
| Tamaño recomendado | Sensor de temperatura del agua |
|---|---|
| Tamaño recomendado del orificio pasante del mamparo (A) | Ø10,1 ± 0,1 |
| Espesor de la tapa de la escotilla (B) | 13 mm |
| Rango de superficie (C) | 20 mm |

¿Puedo usarlo en el aire?
Sí, el sensor puede utilizarse en el aire sin ningún problema.
¿Se puede extender el cable?
Si el cable es demasiado largo o hay varios dispositivos en el bus I²C, pueden producirse problemas de sincronización. Para evitarlo, reduzca el valor de la resistencia pull-up o use una de mayor potencia. También se puede añadir un repetidor I²C o un chip de relé para ampliar la distancia del cable de forma fiable.
¿El hecho de que el sensor esté dentro de una carcasa roscada afecta el tiempo de respuesta de la temperatura?
La carcasa de aluminio está diseñada para ser lo más delgada posible y está rellena de resina epoxi de alta conductividad térmica para mejorar el tiempo de respuesta. Esta configuración minimiza el retraso térmico.
¿Es necesario calibrar el sensor de temperatura? ¿Qué datos proporciona la interfaz I²C?
El sensor incluye coeficientes de calibración de fábrica. Envía datos ADC de 24 bits a través de I²C, y la temperatura se calcula aplicando dichos coeficientes. Puede encontrar todos los detalles e instrucciones de implementación en el manual descargable del sensor.










