












Der Unterwasser-M8-Tiefensensor basiert auf dem digitalen Druckchip MS583730BA und liefert hochauflösende barometrische Messwerte für Unterwasser-Tiefenanwendungen. Sein kompaktes M8-Gewindegehäuse eignet sich ideal für kleinere Gehäuse oder Sensorsysteme, bei denen Platz und Gewicht begrenzt sind. Der mitgelieferte O-Ring und die Mutter ermöglichen eine sichere Durchführungsinstallation auf engen Marinemodulen wie ROVs, Mini-U-Booten und Sensorknoten.
Wie sein größeres Pendant kommuniziert der M8-Sensor über I²C und verwendet einen DF13-4S-Stecker mit Standard-Logikpegelverdrahtung (VIN, GND, SDA, SCL), wodurch er für ArduSub-, Pixhawk- und kundenspezifische Embedded-Systeme geeignet ist. Er arbeitet effizient mit 5 V bei minimalem Stromverbrauch und ist daher besonders für mobile Systeme geeignet. Im Gegensatz zur M10-Version ist die Schutzkappe dieses Modells fest und nicht für die Entfernung oder Feldreinigung vorgesehen.
Um die langfristige Genauigkeit zu gewährleisten, müssen alle Sensoren auf MS5837-Basis – einschließlich dieses Modells – aus dem Wasser entfernt und täglich mindestens zwei Stunden getrocknet werden, wie vom Chiphersteller empfohlen. Für Einsätze, die eine kontinuierliche Eintauchung oder höhere mechanische Belastbarkeit erfordern, empfehlen wir den Unterwasser-M14-Tiefensensor mit Metallmembran (0–35 Bar / 0–350 m). Für eine Version mit abnehmbarer Kappe in einem größeren Gehäuse siehe den Unterwasser-M10-Tiefensensor (0–30 Bar / 0–300 m).

Während der M8-Sensor ideal für kompakte Installationen und Embedded-Plattformen ist, bietet Blu-Sub auch größere Modelle mit erhöhter Haltbarkeit, höheren Druckbereichen und alternativen Kommunikationsmöglichkeiten an.
Unterwasser-M10-Tiefensensor (0–30 Bar / 0–300 m)
I²C-basierter Tiefensensor mit abnehmbarer Schutzkappe und M10-Gewindegehäuse, ermöglicht einfachere Wartung vor Ort und robustes Gehäuse-Mounting.
Unterwasser-M14-Tiefensensor mit Metallmembran (0–35 Bar / 0–350 m)
Hochbelastbarer Sensor mit Edelstahlmembran und ölgefülltem Kern, entwickelt für dauerhafte Eintauchungen und Hochdruckanwendungen mit USART-Kommunikation.

Der Subsea M8 Depth Sensor lässt sich einfach in eine Vielzahl von Blu-Sub-Unterwassergehäusen mit einer standardmäßigen M8-Montagebohrung installieren. Jedes Gehäuse unterstützt eine sichere Abdichtung und einen zuverlässigen Betrieb in der Tiefe. Stellen Sie sicher, dass das ausgewählte Gehäuse eine ausreichende Wandstärke und genügend Innenraum für den Sensorkörper und die Verkabelung bietet.
Subsea Watertight Enclosure Box
Kompaktes Aluminiumgehäuse mit einer Tiefenbewertung von 300 m, vorgebohrt mit zwanzig M10-Anschlüssen – ideal für Sensoren, Schalter oder Signalanzeigen. Für M8-Sensoren ist ein kundenspezifisch gebohrter Anschluss erforderlich.
Subsea Enclosure Acrylic Tube
Transparenter Körper aus gegossenem Acryl mit einer Tiefenbewertung von 250 m, kompatibel mit Blu-Sub-Endkappen aus Aluminium oder Acryl. Wählen Sie eine Endkappe mit einer M8-Bohrung, um diesen Sensor aufzunehmen.
Subsea Enclosure Aluminum Tube
Robustes Aluminiumgehäuse mit einer Tiefenbewertung von 1 000 m. Verwenden Sie es mit passenden Endkappen aus Aluminium oder Acryl, die über eine M8-Bohrung für eine ordnungsgemäße Sensorinstallation und Abdichtung verfügen.
Dieses Produkt kann mit dem universellen M8/M10-Installationsschlüssel installiert werden, einem speziell entwickelten Werkzeug für Blu-Sub M8- und M10-Komponenten im Bulkhead-Stil wie Kabeldurchführungen, Schalter, Sensoren und Steckverbinder.
Sein kompaktes, beidseitiges Design ermöglicht die Installation in engen oder dicht angeordneten Bereichen, während Kabeldurchführungsöffnungen es erlauben, den Schlüssel über bereits angeschlossene Kabel zu schieben, sodass Installation oder Wartung ohne Abklemmen der Verkabelung möglich ist.


| Spezifikation | Unterwasser-M8-Tiefensensor (0–30 Bar / 0–300 m) |
|---|---|
| Gewinde | M8×1 |
| Spannung | 5 V |
| Maximaler Strom | 1,5 mA |
| Kommunikationsmethoden | I²C |
| I²C-Logikspannung (SDA und SCL) | 3,3 V |
| I²C-Adresse | 0x76 (1110110 b) |
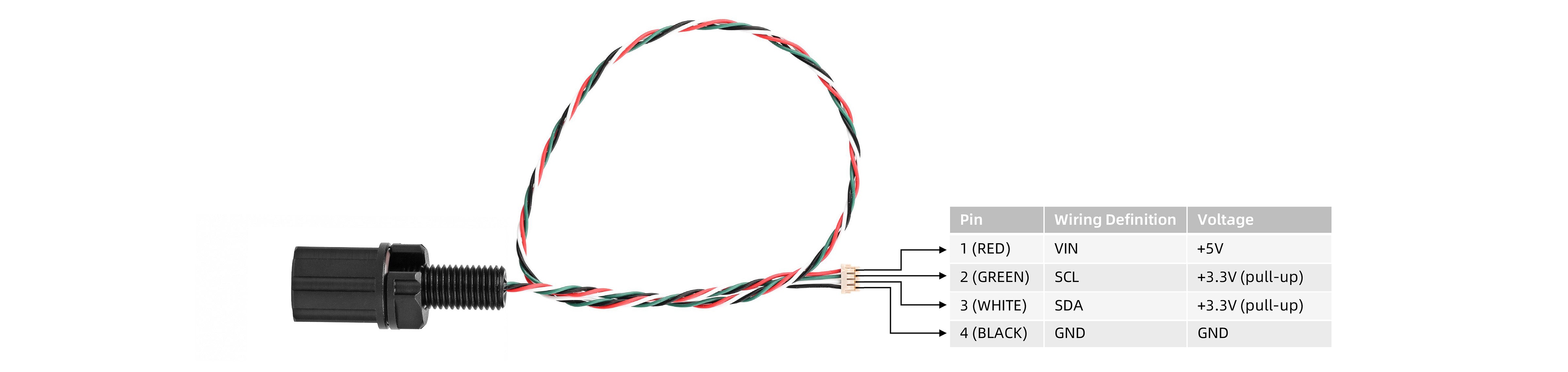
| Verdrahtungsdefinition | Rot: VIN, Grün: SCL, Weiß: SDA, Schwarz: GND |
| Anschlusstyp | DF13-4S-1,25C |
| Kabellänge | Ca. 300 mm |
| Betriebsdruck | 0–30 Bar |
| Betriebstiefe | 0–300 m |
| Überdruck | 50 Bar |
| Druckauflösung | 0,2 mbar |
| Relative Genauigkeit | ±200 mbar |
| Betriebstemperatur | -20 ~ 85 ℃ |
| Temperaturgenauigkeit | ±4 ℃ (0–60 ℃) |
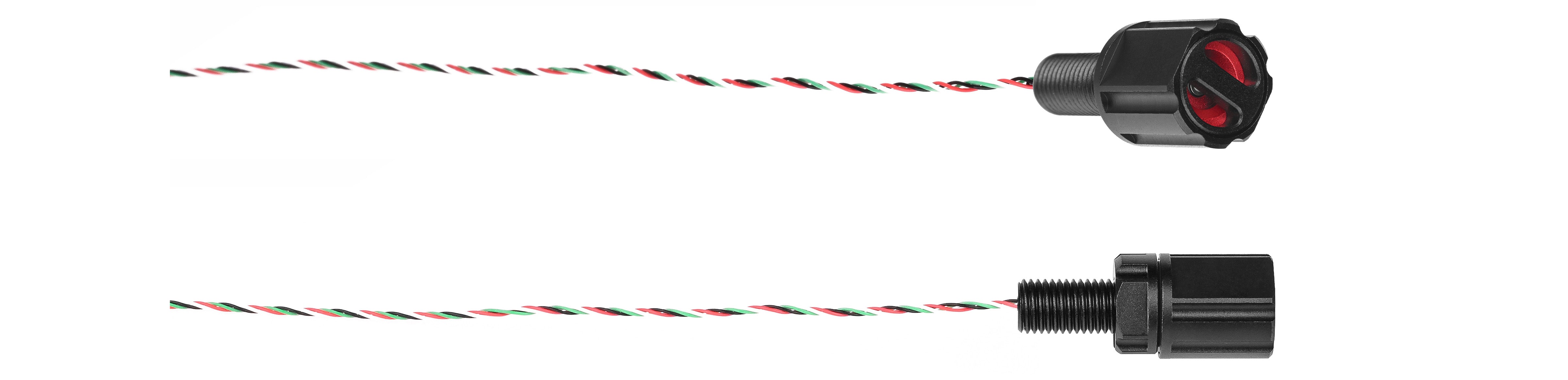
HINWEIS: Bei der M8-Version ist die Schutzkappe fest und kann nicht entfernt werden. Dies beeinträchtigt weder Leistung noch Funktionalität.
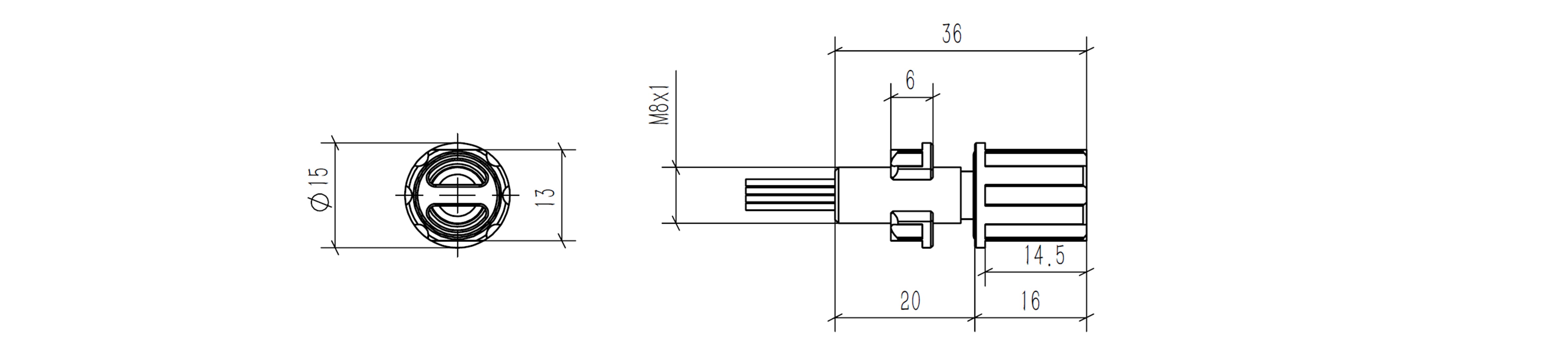
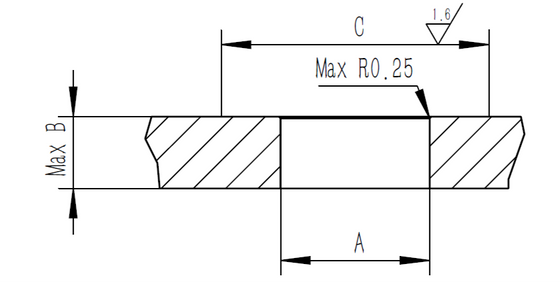
| Empfohlene Größe | M8-Tiefensensor |
|---|---|
| Empfohlene Durchgangslochgröße der Bulkhead (A) | Ø8,1 ± 0,1 mm |
| Dicke der Deckelplatte (B) | 14 mm |
| Oberflächenbereich (C) | 17 mm |
Was ist der Unterschied zwischen dieser und der M10-Version?
Die M8- und M10-Sensoren verwenden denselben Drucksensorchip und bieten identische Leistung. Die einzigen Unterschiede sind die Gewindegröße und dass die M8-Version eine feste (nicht abnehmbare) Schutzkappe besitzt.
Kann das Kabel verlängert werden?
Ja, jedoch können lange Kabelstrecken oder mehrere I²C-Geräte am gleichen Bus die Timing-Leistung beeinträchtigen. Dies kann durch stärkere I²C-Pull-up-Widerstände oder den Einsatz eines I²C-Repeater-Chips ausgeglichen werden.
Wie kann ich Daten ohne ArduSub auslesen? Gibt es Beispielcode?
Der Sensorchip ist weit verbreitet und gut dokumentiert. Open-Source-Beispielcode ist allgemein verfügbar, um den Sensor in eigene Systeme zu integrieren.
Was passiert, wenn die weiße weiche Membran beschädigt ist?
Ist die Membran gebrochen oder durchstoßen, darf der Sensor nicht mehr verwendet werden, da dies die Dichtigkeit und Genauigkeit beeinträchtigt.
Kann er in Meer- und Süßwasser verwendet werden?
Ja. Der Sensor ist sowohl für den Einsatz in Meer- als auch in Süßwasserumgebungen geeignet.
Welche Vorteile bietet er gegenüber anderen Herstellern?
• Hohe Zuverlässigkeit: Präzise gefertigt, um die Lebensdauer des Sensors und die Messgenauigkeit zu maximieren.
• Robustes Design: Die integrierte Schutzkappe verhindert Schäden durch Partikel wie Sand oder Steine und schützt die empfindliche Sensor-Membran.
Kann die Schutzkappe entfernt werden?
Nein, die Schutzkappe des M8-Tiefensensors ist fest und nicht für die Entfernung vorgesehen.











