








Der Subsea M14 Tiefensensor mit Metallmembran ist für langfristige Unterwasseranwendungen und hohe Haltbarkeit in anspruchsvollen Umgebungen konzipiert. Er verfügt über eine robuste Edelstahlmembran, die den äußeren Wasserdruck über eine mit Silikonöl gefüllte Kammer an die interne Sensorschaltung überträgt. Diese Konstruktion ermöglicht einen wartungsfreien Betrieb ohne tägliches Trocknen – ideal für den Dauereinsatz.
Im Kern enthält der Sensor eine integrierte Auswerteplatine, die 24-Bit-Druck- und Temperaturdaten erfasst, temperaturkompensiert und in Echtzeit berechnete Tiefen- und Temperaturwerte ausgibt. Diese Ausgänge werden über eine serielle Schnittstelle mit TTL-Pegel (5 V Logik, 115200 bps) im USART-Protokoll übertragen. Im Gegensatz zu I²C-basierten Tiefensensoren, die direkt mit Pixhawk- oder ähnlichen ArduSub-Systemen kommunizieren, nutzt dieser Sensor UART und erfordert einen Mikrocontroller oder Begleitcomputer, der TTL-Seriell-Daten lesen kann. Ein standardmäßiger 4-poliger XH2.54-Stecker und ein 300 mm Anschlusskabel sind im Lieferumfang enthalten und ermöglichen eine einfache Integration.
Diese Architektur bietet eine verbesserte Genauigkeit und Zuverlässigkeit, insbesondere bei Hochdruck- oder Langzeitanwendungen, bei denen Robustheit entscheidend ist. Das abgedichtete Innenöl- und Membrandesign schützt die Sensorelemente zudem vor physischer Verunreinigung oder Salinitätsdrift. Für Anwendungen, bei denen hohe Haltbarkeit und wartungsfreier Betrieb Priorität haben, stellt dieser Sensor eine robuste Aufrüstungsoption gegenüber kompakteren I²C-basierten Varianten dar.

Dieser Sensor eignet sich ideal für Langzeiteinsätze und Anwendungen mit hohen Zuverlässigkeitsanforderungen. Für kompakte und kostengünstige Installationen stehen zwei weitere Blu-Sub-Tiefensensoren auf Basis des MS5837-Chips zur Verfügung.
Subsea M8 Tiefensensor (0–30 Bar)
Ultrakompakter, I²C-basierter Tiefensensor mit fester Schutzkappe und M8-Gewindegehäuse, entwickelt für die Integration in Pixhawk-/ArduSub-Systeme mit begrenztem Bauraum.
Subsea M10 Tiefensensor (0–30 Bar)
Mittelgroßer, I²C-kompatibler Sensor mit abnehmbarer Schutzkappe und M10-Gehäusegewinde – ideal für modulare Aufbauten und einfachen Wartungszugang.

Der Subsea M14 Metal Diaphragm Depth Sensor lässt sich über eine entsprechend dimensionierte M14-Montagebohrung in eine Vielzahl von Blu-Sub-Unterwassergehäusen installieren. Jedes Gehäuse muss eine ordnungsgemäße Abdichtung, ausreichende Schottdurchlassstärke und genügend Innenraum für den Sensorkörper und die Verkabelung bieten.
Subsea Watertight Enclosure Box
Kompaktes Aluminiumgehäuse mit einer Tiefenbewertung von 300 m, vorgebohrt mit zwanzig M10-Anschlüssen – ideal für M10-Sensoren, Anzeigen oder Schalter. Die Installation eines M14-Sensors erfordert eine kundenspezifische Bohrung.
Subsea Enclosure Acrylic Tube
Transparenter Körper aus gegossenem Acryl mit einer Tiefenbewertung von 250 m, verwendet mit kompatiblen Endkappen und Flanschen. Die Installation eines M14-Sensors erfordert eine kundenspezifisch gebohrte Endkappe aus Aluminium oder Acryl, um eine ordnungsgemäße Abdichtung und Abstützung zu gewährleisten.
Subsea Enclosure Aluminum Tube
Robustes Aluminiumgehäuse mit einer Tiefenbewertung von 1 000 m. Die Installation eines M14-Sensors erfordert eine kundenspezifisch gebohrte Endkappe aus Aluminium oder Acryl, um eine sichere Montage und Abdichtung zu gewährleisten. Ideal für langfristige Einsätze oder Tiefwassereinsätze.
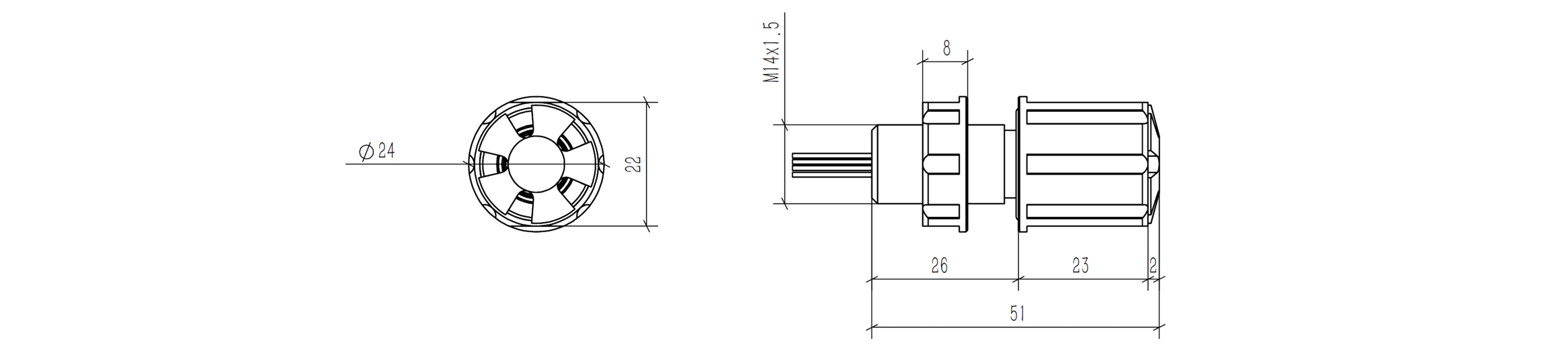
| Spezifikation | M14 Tiefensensor |
|---|---|
| Gewinde | M14 × 1.5 |
| Material | Edelstahl |
| Spannung | 5 V |
| Nennstrom | 20 mA |
| Kommunikationsmodus | USART (TTL) |
| Baudrate | 115200 |
| Druckbereich | 0–35 Bar |
| Überdruckfestigkeit | 2 × Druckbereich |
| Grundfehler | ±0,2 % FS (±0,72 m) |
| Gesamtfehlerbereich | ±1 % FS (3,6 m) |
| Betriebstemperatur | -10 ~ 80 ℃ |
| Temperaturgenauigkeit | ±2 ℃ |
| Kabellänge | ca. 300 mm |
| Steckertyp | XH2.54–4 Pin |

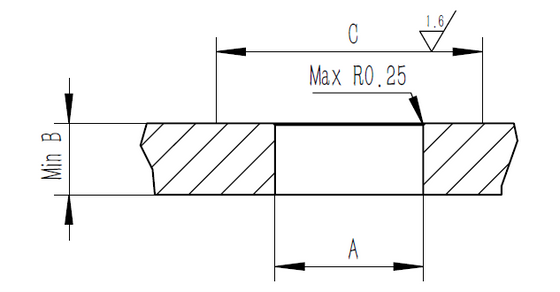
| Empfohlene Größe | M14 Tiefensensor |
|---|---|
| Empfohlener Durchgangslochdurchmesser (A) | Ø14.1 ± 0.1 |
| Abdeckungsstärke (B) | 18 mm |
| Oberflächenbereich (C) | 26 mm |
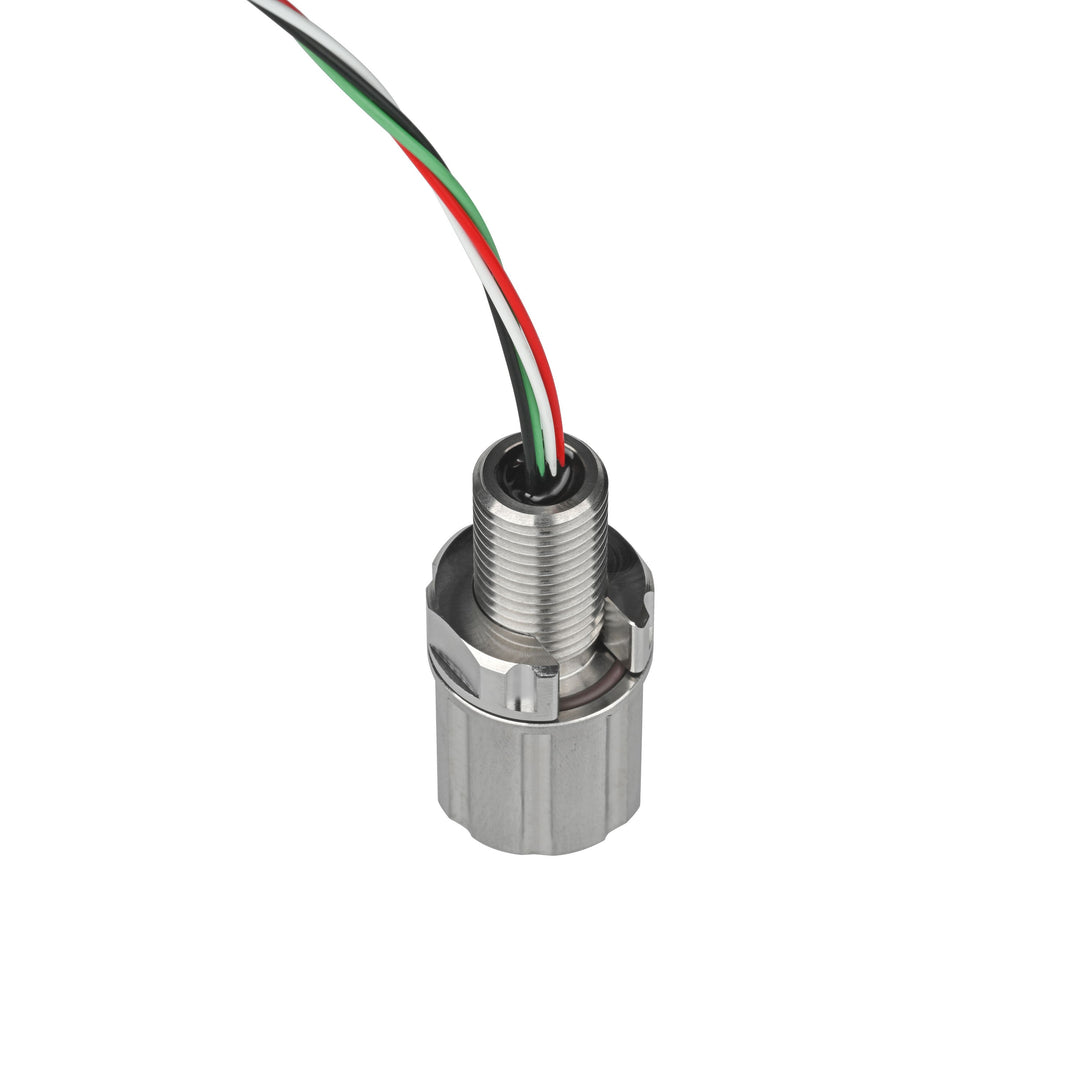
| Bezeichnung | Kabelfarbe | Name | Funktionsbeschreibung |
|---|---|---|---|
| 1 | Rot | + | Positive Stromversorgung (5 V DC) |
| 2 | Weiß | TX | Serielle Übertragung (TXD) |
| 3 | Grün | RX | Serieller Empfang (RXD) |
| 4 | Schwarz | - | Negative Stromversorgung (GND) |
| Externer Controller | M14 Tiefensensor |
|---|---|
| 5V | 5V |
| RXD | TXD |
| TXD | RXD |
| GND | GND |
T=XX.XXD=XX.XX\r\n\r\n: Ende jeder DatenzeileT=25.27D=1.21 bedeutet 25,27 °C und 1,21 m| Serieller Befehl | Beschreibung | Standardwert |
|---|---|---|
!Fxxxx\r\n |
Setzt den Sensor auf eine bestimmte Dichteberechnung. "xxxx" steht für die eingestellte Flüssigkeitsdichte. Süßwasser: 997 kg/m³ | Salzwasser: 1029 kg/m³ |
997 |
!Dxx.xx\r\n |
Reservierter Befehl zur Anpassung des Tiefen-Offsets. "xx.xx" ist ein Gleitkomma-Offsetwert. |
0 |
!Txx.xx\r\n |
Reservierter Befehl zur Anpassung des Temperatur-Offsets. "xx.xx" ist ein Gleitkomma-Offsetwert. |
0 |
!!\r\n |
Pausiert die Sensorausgabe. Die serielle Schnittstelle gibt alle Parameter aus. | Keine |
!R\r\n |
Setzt die Berechnungsplatine zurück. | Keine |
!r\r\n |
Stellt alle Werkseinstellungen wieder her. | Keine |
!C\r\n |
Löscht alle Offset-Einstellungen. | Keine |
!!\r\n):!D0.55 angewendet auf einen Messwert von -0.55 → Ausgabe = 0.00!D-0.10 angewendet auf einen Messwert von 0.10 → Ausgabe = 0.00!T1.00 angewendet auf 25.00 °C → Ausgabe = 26.00 °C!T-1.00 angewendet auf 25.00 °C → Ausgabe = 24.00 °C!Txx.xx\r\n unter Bezugnahme auf eine bekannte externe Temperaturquelle durchgeführt werden.
Verfügt der Sensor über eine integrierte Auswerteplatine?
Ja. Der Sensor enthält eine interne Auswerteplatine, die 24-Bit-Druck- und Temperaturdaten erfasst, temperaturkompensiert und Tiefen- sowie Temperaturwerte in Echtzeit über eine TTL-Seriellschnittstelle ausgibt.
Können die Kabel verlängert werden?
Der Sensor verwendet eine TTL-Seriellkommunikation, die sich nicht ideal für lange Kabelstrecken eignet. Wenn eine Verlängerung erforderlich ist, sollte ein Pegelwandler zur Umwandlung auf RS-232 oder RS-485 verwendet werden, um die Bitfehlerrate (BER) zu verringern.
Muss der Sensor kalibriert werden? Welche Daten werden über die serielle Schnittstelle ausgegeben?
Der Sensor gibt direkt Tiefen- und Temperaturwerte über die serielle Schnittstelle aus. Eine Kalibrierung kann bei Bedarf an der Oberfläche durchgeführt werden, ist jedoch in der Regel nicht notwendig, da die Daten bereits verarbeitet und kompensiert ausgegeben werden.
Was passiert, wenn die Metallmembran zerkratzt oder eingedellt ist?
Wenn die Membran beschädigt oder verformt ist – beispielsweise durch Werkzeugspuren oder Lochfraß – darf der Sensor nicht verwendet werden, da dies sowohl die Messgenauigkeit als auch die Dichtheit beeinträchtigen kann.
Kann ich den Sensor durch Fingerdruck testen?
Nein. Manueller Druck ist ungleichmäßig und kann die empfindliche Metallmembran, insbesondere durch Fingernägel, beschädigen. Vermeiden Sie jegliche direkte Drucktests.
Ist der Sensor direkt mit ArduSub kompatibel?
Nein, der Sensor nutzt TTL-Seriellausgabe und ist nicht direkt Plug-and-Play-kompatibel mit ArduSub-Systemen. Eine Integration erfordert benutzerdefinierte Firmware oder zusätzliche Schnittstellenhardware.