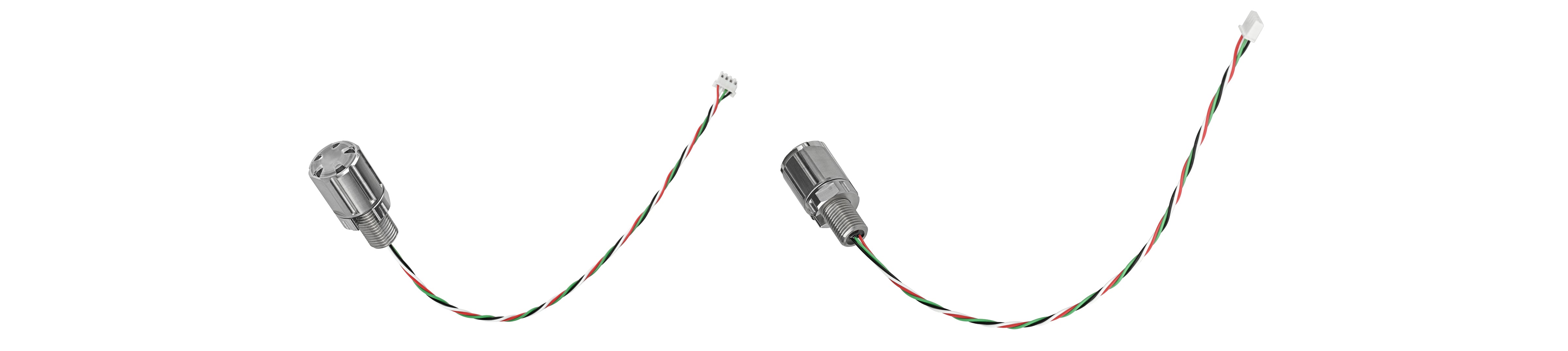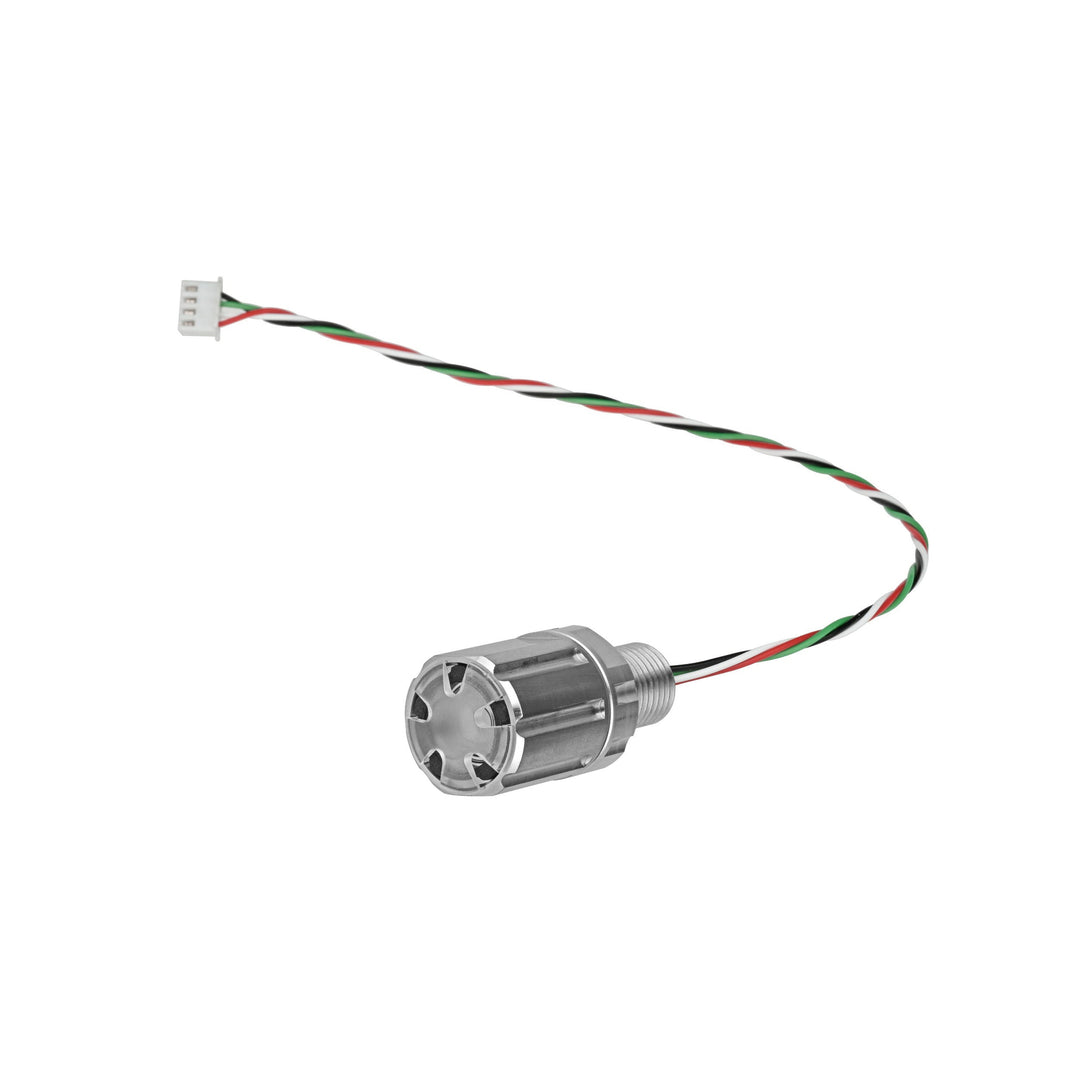

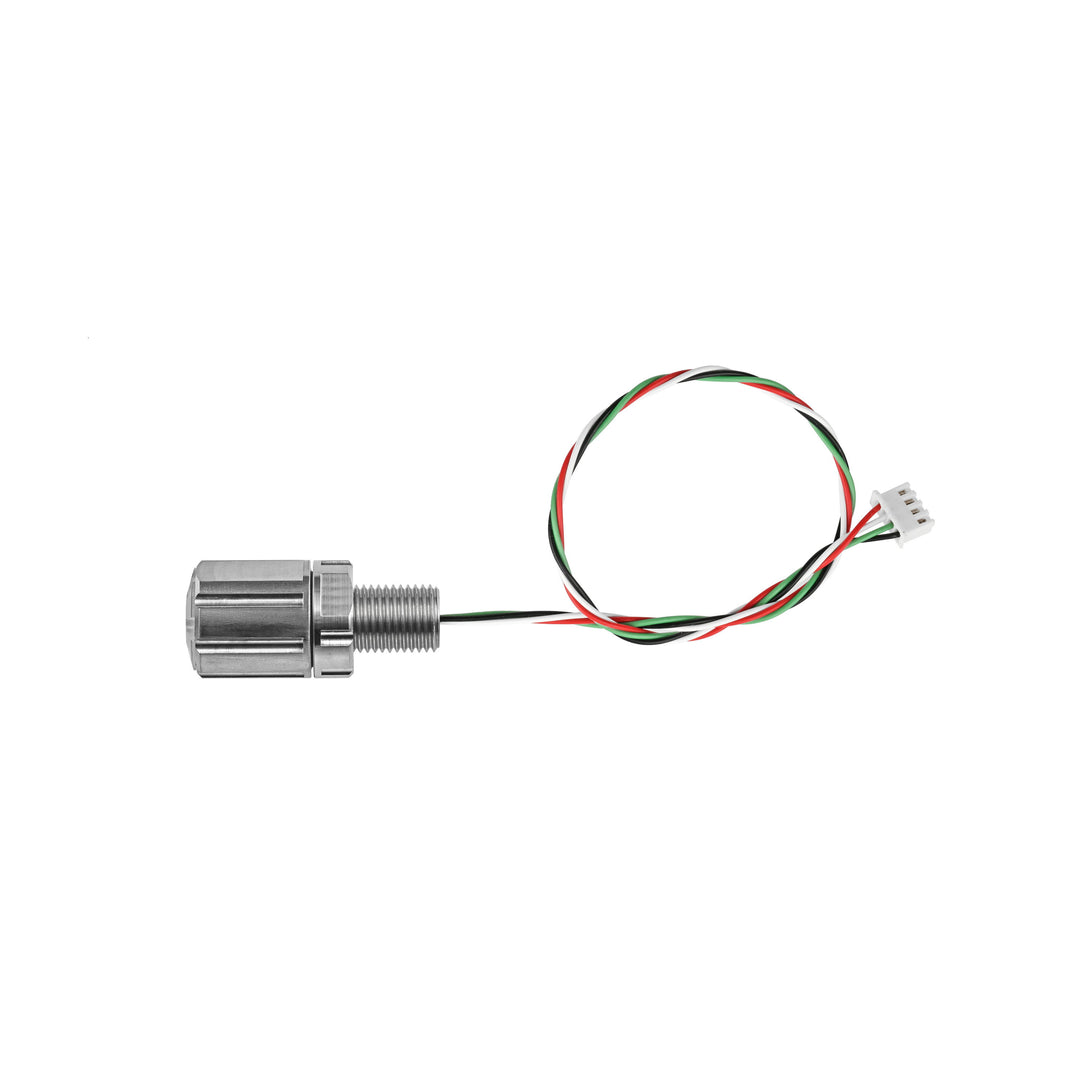
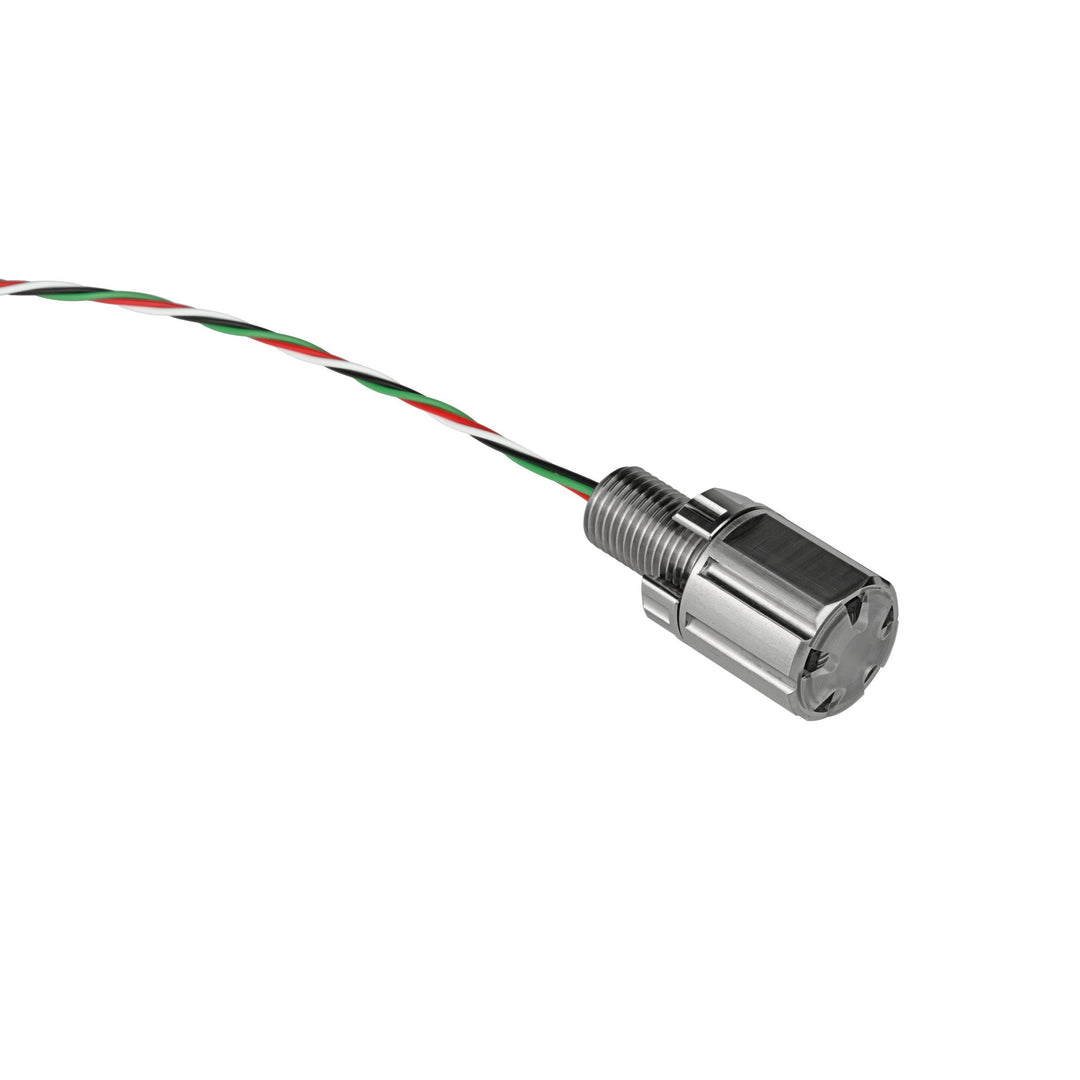








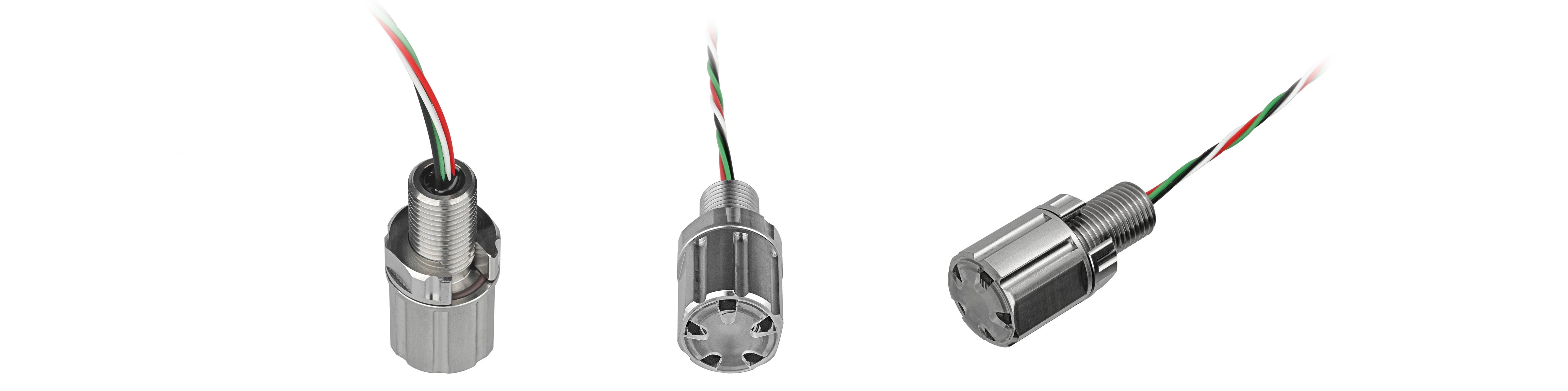
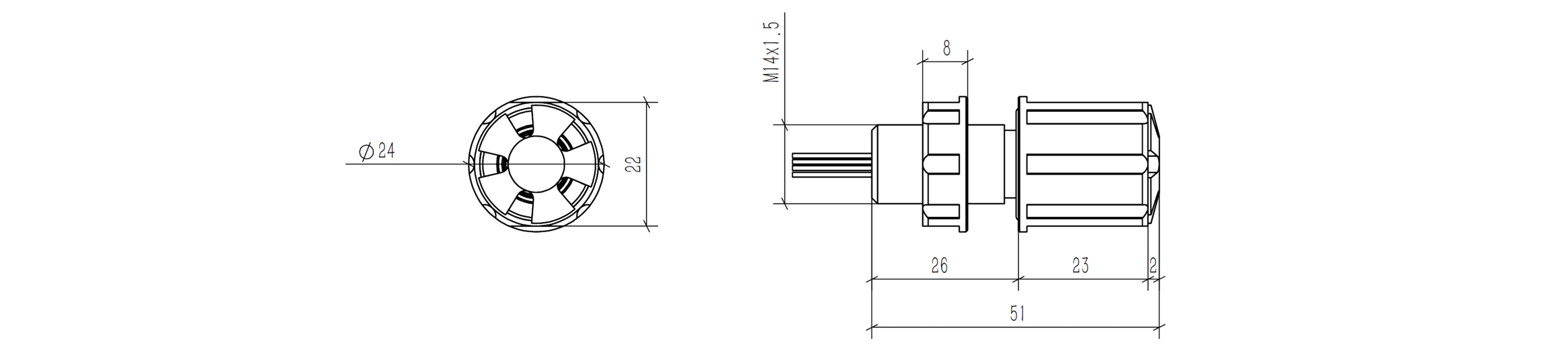
El sensor de profundidad submarino M14 con diafragma metálico está diseñado para una inmersión prolongada y una alta durabilidad en entornos submarinos exigentes. Incorpora un resistente diafragma de acero inoxidable que transmite la presión externa del agua al circuito interno de detección a través de una cámara rellena de aceite de silicona. Esta construcción permite un funcionamiento sin mantenimiento ni secado diario, ideal para escenarios de uso continuo.
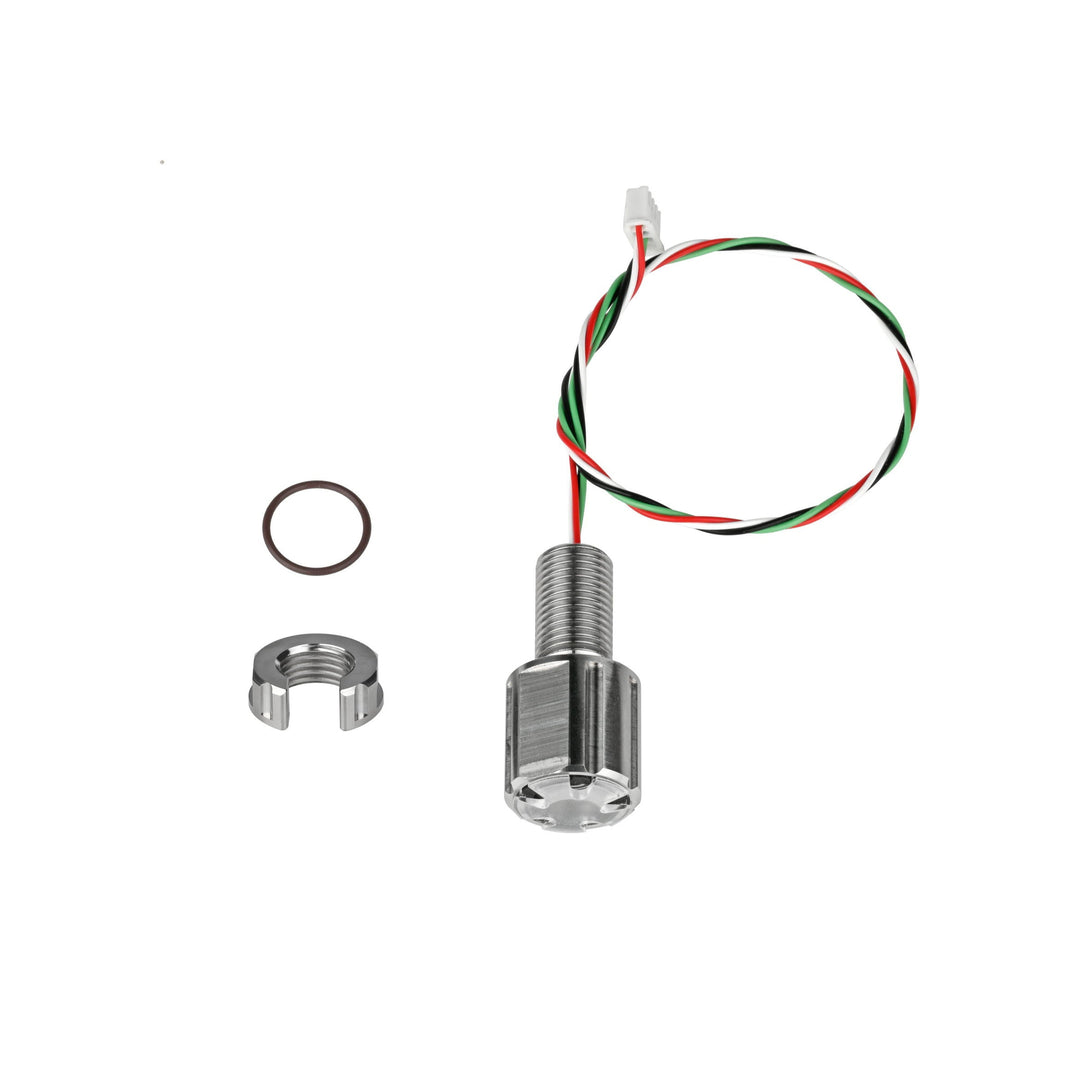
En su núcleo se encuentra una placa de procesamiento integrada que recopila datos de presión y temperatura de 24 bits, aplica compensación térmica y genera lecturas de profundidad y temperatura en tiempo real. Estas salidas se transmiten mediante una interfaz serial con comunicación USART de nivel TTL (lógica de 5 V, 115200 bps). A diferencia de los sensores de profundidad basados en I²C que se conectan directamente con sistemas Pixhawk o ArduSub, este sensor se comunica a través de UART y requiere un microcontrolador o un ordenador auxiliar capaz de leer datos seriales TTL. Incluye un conector estándar XH2.54 de 4 pines y un cable de 300 mm para una integración sencilla.
Esta arquitectura ofrece mayor precisión y fiabilidad, especialmente en aplicaciones de alta presión o de larga duración donde la robustez es fundamental. El diseño sellado con aceite y diafragma aísla los elementos sensores de la contaminación física y la deriva por salinidad. Para aplicaciones en las que la alta durabilidad y el mantenimiento mínimo son prioritarios, este sensor ofrece una opción de actualización robusta frente a las alternativas más compactas basadas en I²C.

Este sensor es ideal para aplicaciones de inmersión prolongada y alta fiabilidad. Para implementaciones compactas y rentables, hay otros dos sensores de profundidad Blu-Sub disponibles con la plataforma de chip MS5837.
Sensor de profundidad submarino M8 (0–30 bar)
Sensor de profundidad ultracompacto basado en I²C con tapa protectora fija y cuerpo roscado M8, diseñado para la integración con Pixhawk/ArduSub en sistemas con limitaciones de espacio.
Sensor de profundidad submarino M10 (0–30 bar)
Sensor de tamaño mediano compatible con I²C, con tapa protectora extraíble y carcasa roscada M10; ideal para construcciones modulares y acceso para mantenimiento.

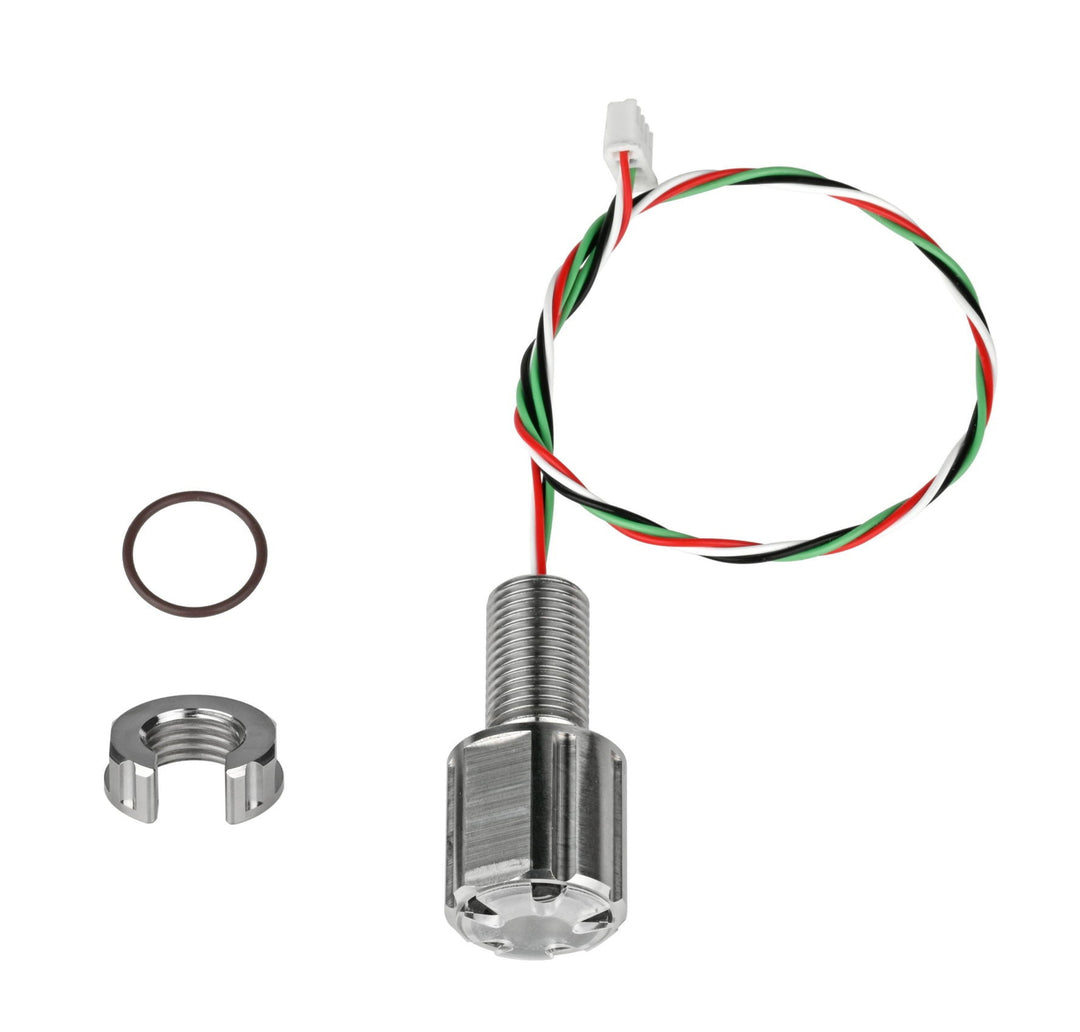
El sensor de profundidad submarino M14 con diafragma metálico se instala en una variedad de boîtiers submarinos Blu-Sub mediante un orificio de montaje M14 del tamaño adecuado. Cada boîtier debe proporcionar un sellado correcto, suficiente grosor de mamparo y espacio interno adecuado para el cuerpo del sensor y el cableado.
Boîtier estanco submarino
Boîtier compacto de aluminio con índice de profundidad de 300 m, preperforado con veinte puertos M10, ideal para sensores, indicadores o interruptores M10. La instalación de un sensor M14 requiere perforación personalizada.
Tubo de boîtier acrílico submarino
Cuerpo transparente de acrílico fundido con índice de profundidad de 250 m, utilizado con embouts y brides compatibles. La instalación de un sensor M14 requiere un embout de aluminio o acrílico perforado a medida para proporcionar un sellado y soporte adecuados.
Tubo de boîtier de aluminio submarino
Boîtier robusto de aluminio con índice de profundidad de 1 000 m. La instalación de un sensor M14 requiere un embout de aluminio o acrílico perforado a medida para garantizar un montaje y sellado seguros. Ideal para despliegues de larga duración o en aguas profundas.
| Especificación | Sensor de profundidad M14 |
|---|---|
| Rosca | M14 × 1,5 |
| Material | Acero inoxidable |
| Voltaje | 5 V |
| Corriente nominal | 20 mA |
| Modo de comunicación | USART (TTL) |
| Velocidad en baudios | 115200 |
| Rango de presión | 0–35 bar |
| Presión máxima | 2 × rango de presión |
| Error intrínseco | ±0,2 % FS (±0,72 m) |
| Rango de error total | ±1 % FS (3,6 m) |
| Temperatura de funcionamiento | -10 ~ 80 ℃ |
| Precisión de temperatura | ±2 ℃ |
| Longitud del cable | Aprox. 300 mm |
| Tipo de conector | XH2.54 – 4 pines |

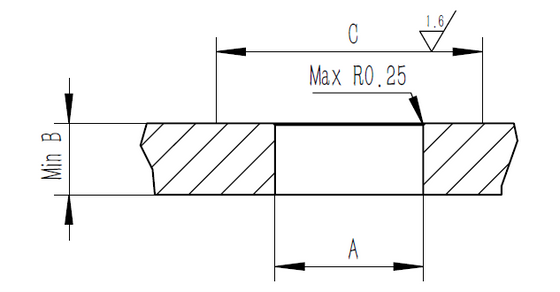
| Tamaño recomendado | Sensor de profundidad M14 |
|---|---|
| Tamaño recomendado del orificio pasante en el mamparo (A) | Ø14,1 ± 0,1 |
| Espesor de la tapa o mamparo (B) | 18 mm |
| Rango de superficie (C) | 26 mm |
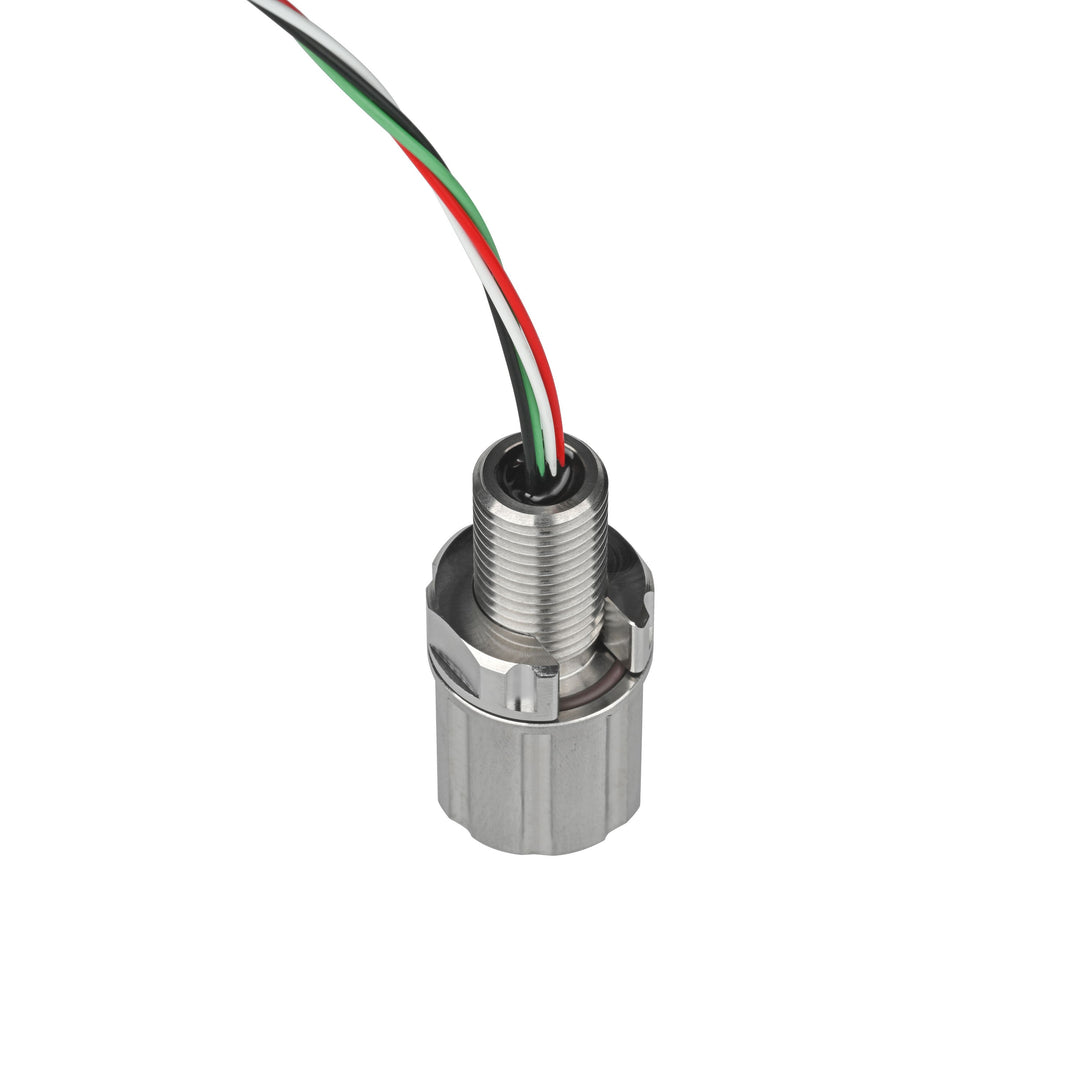
| Etiqueta | Cable | Nombre | Descripción de la función |
|---|---|---|---|
| 1 | Rojo | + | Alimentación positiva (5 V CC) |
| 2 | Blanco | TX | Transmisión del puerto serial (TXD) |
| 3 | Verde | RX | Recepción del puerto serial (RXD) |
| 4 | Negro | - | Alimentación negativa (GND) |
| Controlador externo | Sensor de profundidad M14 |
|---|---|
| 5 V | 5 V |
| RXD | TXD |
| TXD | RXD |
| GND (tierra) | GND (tierra) |
T=XX.XXD=XX.XX\r\n\r\n: fin de cada línea de datosT=25.27D=1.21 significa 25,27 °C y 1,21 m| Comando serial | Descripción | Valor predeterminado |
|---|---|---|
!Fxxxx\r\n |
Configura el sensor para calcular con un valor de densidad específico. “xxxx” representa la densidad del líquido establecida. Agua dulce: 997 kg/m³ | Agua salada: 1029 kg/m³ |
997 |
!Dxx.xx\r\n |
Comando reservado para el ajuste del desplazamiento de la salida de profundidad. “xx.xx” es un desplazamiento en punto flotante. |
0 |
!Txx.xx\r\n |
Comando reservado para el ajuste del desplazamiento de la salida de temperatura. “xx.xx” es un desplazamiento en punto flotante. |
0 |
!!\r\n |
Pausa la salida del sensor. El puerto serial imprime todos los parámetros. | Ninguno |
!R\r\n |
Reinicia la placa de procesamiento. | Ninguno |
!r\r\n |
Restaura todos los ajustes iniciales. | Ninguno |
!C\r\n |
Borra todos los ajustes de desplazamiento. | Ninguno |
!!\r\n):!D0.55 aplicado a un valor medido de -0.55 → salida = 0.00!D-0.10 aplicado a un valor medido de 0.10 → salida = 0.00!T1.00 aplicado a 25,00 °C → salida = 26,00 °C!T-1.00 aplicado a 25,00 °C → salida = 24,00 °C!Txx.xx\r\n con referencia a una fuente de temperatura externa conocida.
¿El sensor tiene una placa de procesamiento integrada?
Sí. El sensor incorpora una placa interna que captura datos de presión y temperatura de 24 bits, aplica compensación térmica y emite lecturas de profundidad y temperatura en tiempo real a través de una interfaz serial TTL.
¿Se pueden extender los cables?
El sensor utiliza comunicación serial TTL, la cual no es ideal para recorridos de cable largos. Si se necesita extender el cableado, use un convertidor de nivel para pasar a RS-232 o RS-485 y así reducir la tasa de error de bits (BER).
¿El sensor requiere calibración? ¿Qué datos se emiten desde el puerto serial?
El sensor transmite directamente los valores de profundidad y temperatura por el puerto serial. La calibración puede realizarse en superficie si se desea, pero la salida ya está procesada y no requiere decodificación ni compensación adicionales.
¿Qué sucede si el diafragma metálico se raya o abolla?
Si el diafragma está deformado —por ejemplo, por daños de una llave o corrosión— no debe utilizarse, ya que podría afectar tanto la precisión de los datos como la integridad del sellado.
¿Puedo aplicar presión con el dedo para probar el sensor?
No. La presión manual es irregular y puede deformar el sensible diafragma metálico, especialmente con las uñas. Evite realizar pruebas de presión directa.
¿Es directamente compatible con ArduSub?
No. El sensor utiliza salida serial TTL y no es plug-and-play con los sistemas ArduSub. Su integración requiere firmware personalizado o una interfaz adicional.