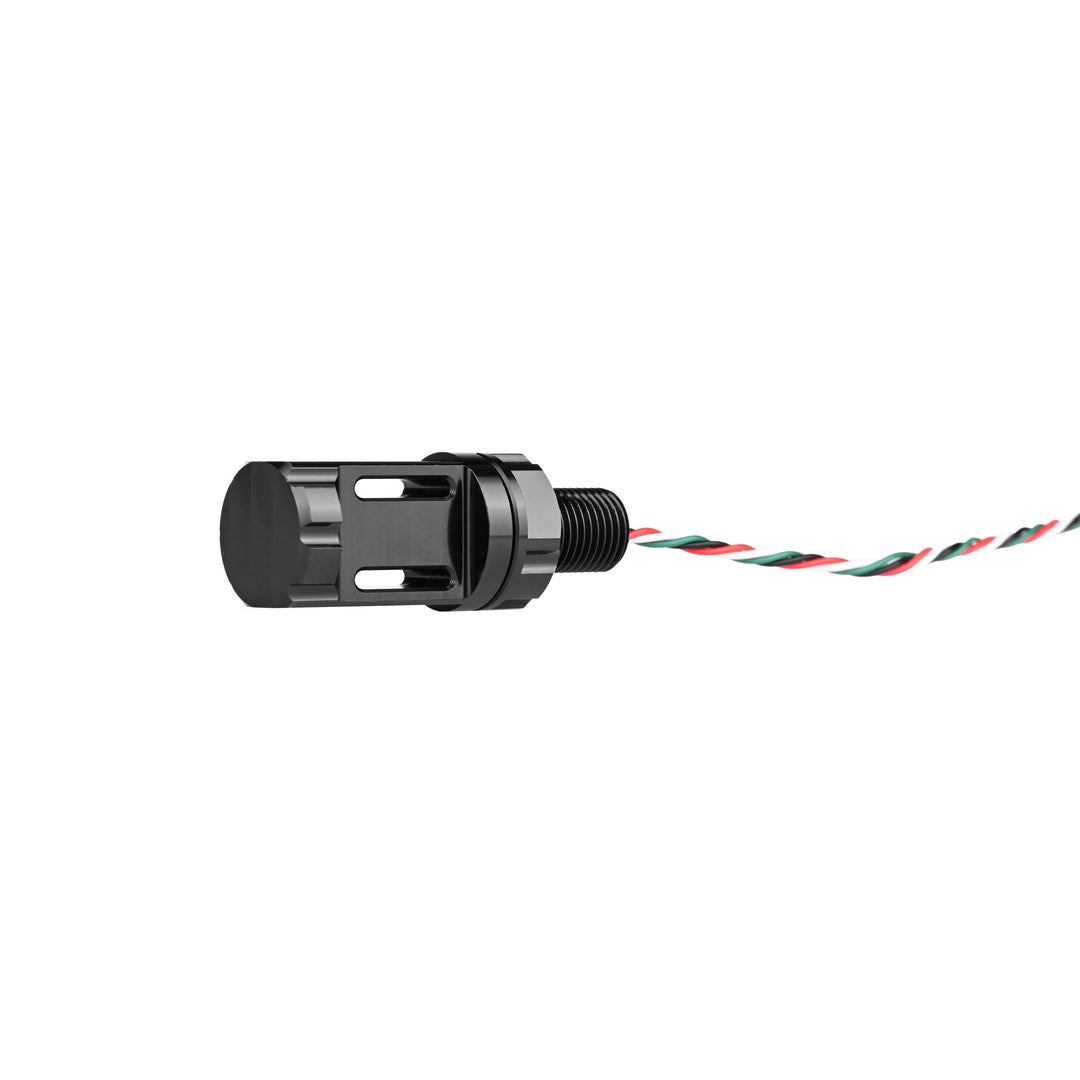













Conçu pour une précision optimale et une intégration aisée, le capteur de température de l’eau Subsea M10 fournit des mesures numériques fiables de la température dans les environnements sous-marins exigeants. Il utilise un élément de détection TSYS01 pour atteindre une précision de ±0,1 °C dans une plage typique de –5 à 50 °C et maintient sa stabilité sur une large plage étendue de –40 °C à 125 °C.
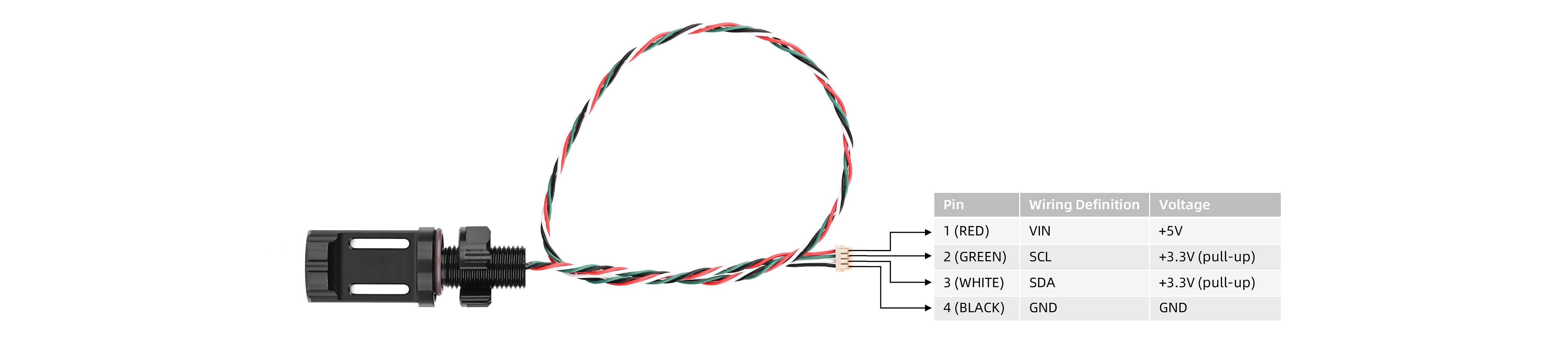
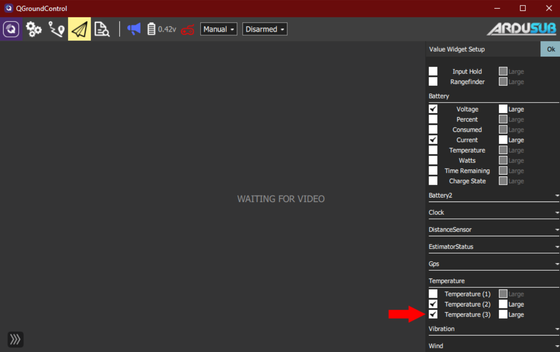
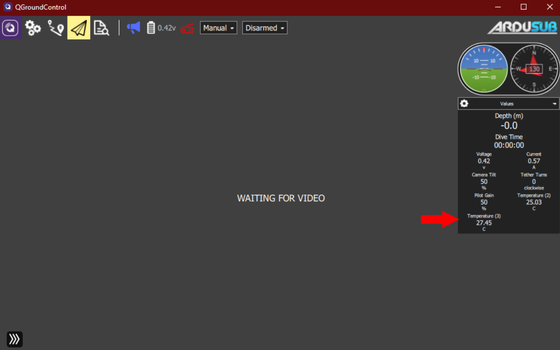
Préétalonné pour une utilisation immédiate, le capteur transmet les données de température via I²C grâce à des coefficients d’étalonnage intégrés, éliminant ainsi tout traitement manuel. Il se connecte directement aux systèmes Pixhawk via un connecteur DF13-4S-1.25C et une interface I²C standard à 4 fils, permettant une intégration transparente avec les plateformes ArduSub et QGroundControl.
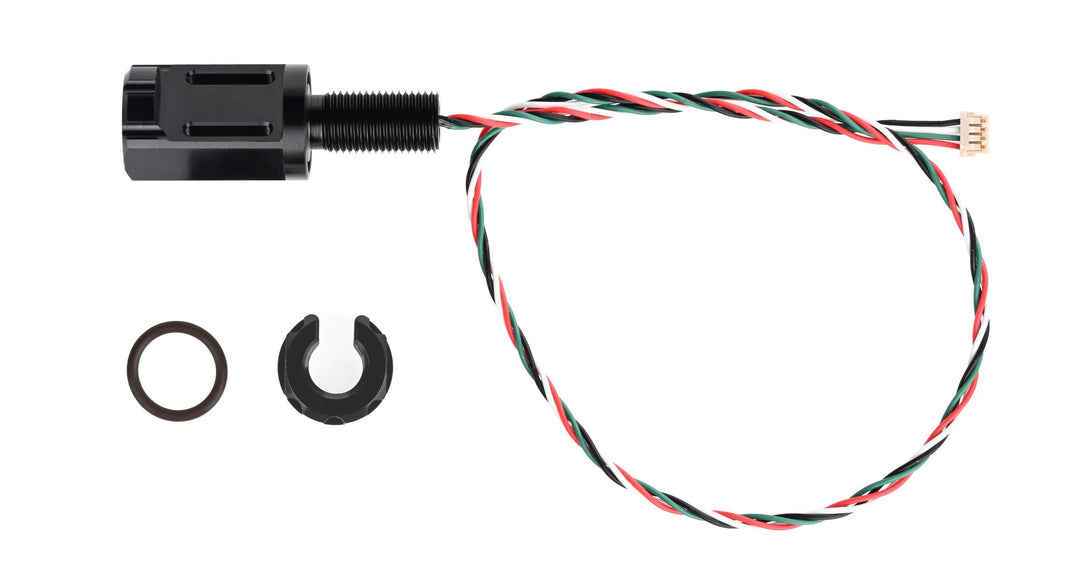
Le boîtier en aluminium fileté M10 simplifie l’installation dans des boîtiers ou cloisons sous-marins. Garnissé d’époxy thermoconducteur, le capteur offre des temps de réponse rapides tout en protégeant l’électronique de la pression et de l’humidité jusqu’à 1 000 m de profondeur.
Pour les câbles plus longs ou les dispositifs I²C multiples, l’intégrité du signal peut être améliorée grâce à des résistances de tirage plus puissantes ou à des circuits relais I²C. Le capteur convient également aux applications en surface, offrant une flexibilité de déploiement tant sous l’eau qu’en milieu aérien.


Le capteur de température d’eau sous-marin M10 s’intègre facilement aux boîtiers sous-marins Blu-Sub à l’aide d’un port de montage fileté M10 standard. Chaque boîtier assure une étanchéité adéquate et un support mécanique fiable pour des mesures précises de la température en profondeur. Vérifiez que le dégagement interne et l’épaisseur du panneau conviennent au corps et au connecteur du capteur.
Boîtier étanche sous-marin
Boîtier compact en aluminium avec indice de profondeur de 300 m, prépercé avec vingt ports M10 — idéal pour l’intégration directe de capteurs filetés M10 comme ce capteur de température. Aucune modification requise.
Tube de boîtier sous-marin en acrylique
Tube transparent en acrylique coulé avec indice de profondeur de 250 m, compatible avec les embouts Blu-Sub en aluminium ou en acrylique. Sélectionnez des embouts avec ports de montage M10 pour fixer solidement le capteur de température.
Tube de boîtier sous-marin en aluminium
Boîtier en aluminium conçu pour les grandes profondeurs avec indice de profondeur de 1 000 m. À utiliser avec des embouts assortis en aluminium ou en acrylique dotés de ports de montage M10 pour un déploiement sécuritaire du capteur de température dans des conditions sous-marines à haute pression.

Ce produit peut être installé à l’aide de la clé d’installation universelle M8/M10, un outil dédié conçu pour les composants Blu-Sub M8 et M10 de type traversant, tels que les pénétrateurs, interrupteurs, capteurs et connecteurs.
Sa conception compacte à double extrémité permet l’installation dans des configurations étroites ou rapprochées, tandis que les fentes de passage de câble permettent à la clé de glisser sur des câbles déjà connectés, facilitant ainsi l’installation ou la maintenance sans déconnexion du câblage.
Le tube de couplage sous-marin M10 offre une solution de montage externe pour le capteur de température de l’eau lorsqu’une installation directe dans un boîtier n’est pas possible. Il fournit un espace interne pour le câblage et peut être scellé avec de l’époxy afin de préserver l’étanchéité et de protéger les connexions. Idéal pour les constructions modulaires de ROV ou d’AUV où l’accessibilité des capteurs et la simplification du routage des câbles sont essentielles.

| Spécification | Capteur de température de l’eau sous-marin M10 |
|---|---|
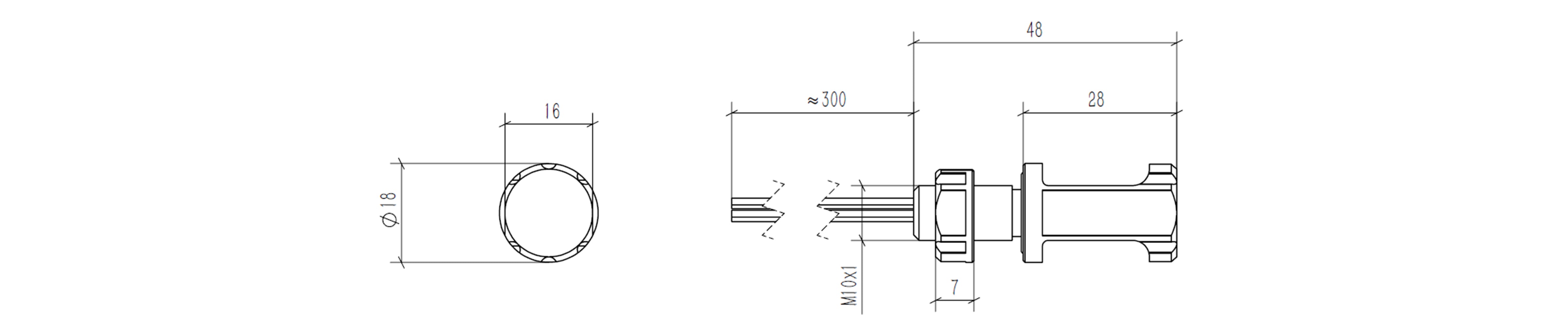
| Filetage | M10×1 |
| Matériau | Aluminium anodisé noir |
| Poids | 19,5 g |
| Tension | 5 V |
| Niveaux logiques I²C (SCL/SDA) | 3,3 V |
| Définition du câblage | Rouge : VIN ; Vert : SCL ; Blanc : SDA ; Noir : GND |
| Adresse I²C | 0x77 |
| Longueur du câble | Environ 300 mm |
| Type de connecteur | DF13-4S-1.25C |
| Température de fonctionnement | −40 ~ 125 ℃ |
| Précision absolue | ±0,1 ℃ (−5 ~ 50 ℃) ±0,5 ℃ (−40 ~ 125 ℃) |
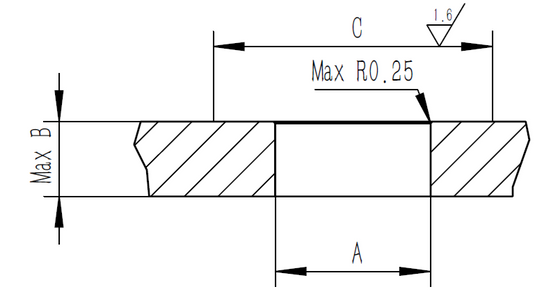
| Taille recommandée | Capteur de température de l’eau |
|---|---|
| Taille recommandée du trou traversant de cloison (A) | Ø10,1 ± 0,1 |
| Épaisseur du panneau (B) | 13 mm |
| Plage de surface (C) | 20 mm |

Puis-je l’utiliser dans l’air ?
Oui, le capteur peut être utilisé dans l’air sans problème.
Le câble peut-il être rallongé ?
Si le câble est trop long ou si plusieurs périphériques sont présents sur le bus I²C, des problèmes de synchronisation peuvent survenir. Pour éviter cela, réduisez la valeur de la résistance de tirage ou utilisez une résistance de tirage plus forte. Un répéteur ou un relais I²C peut également être ajouté pour prolonger la distance du câble de manière fiable.
Le fait que le capteur soit intégré dans un boîtier fileté affecte-t-il le temps de réponse de la température ?
Le boîtier en aluminium a été conçu pour être aussi fin que possible et est rempli d’époxy à haute conductivité thermique afin d’améliorer le temps de réponse. Cette configuration minimise le décalage thermique.
Le capteur de température nécessite-t-il un étalonnage ? Quelles données sont fournies par l’interface I²C ?
Le capteur inclut des coefficients d’étalonnage d’usine. Il génère des données ADC 24 bits via I²C, et la température est obtenue par application de ces coefficients. Des informations complètes et des instructions de mise en œuvre sont disponibles dans le manuel téléchargeable du capteur.










