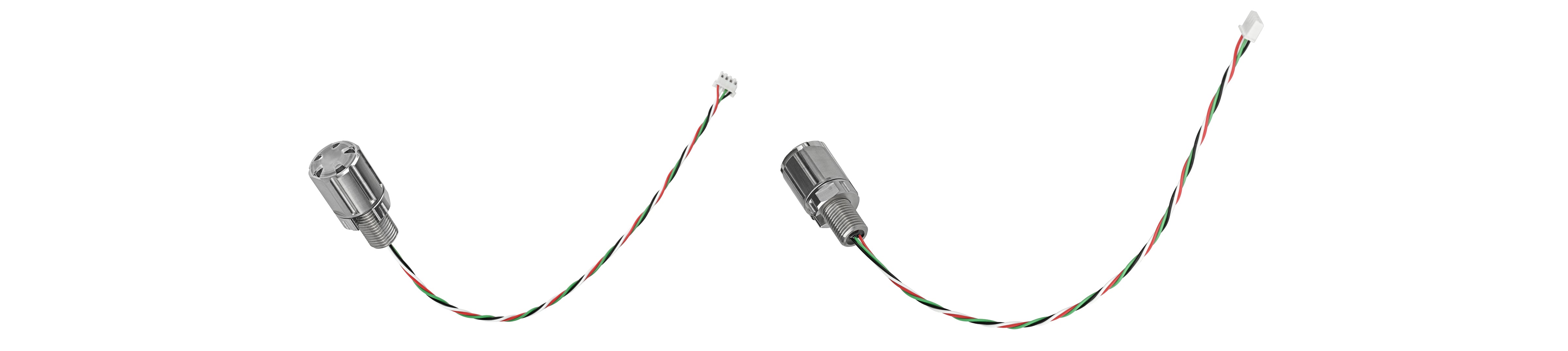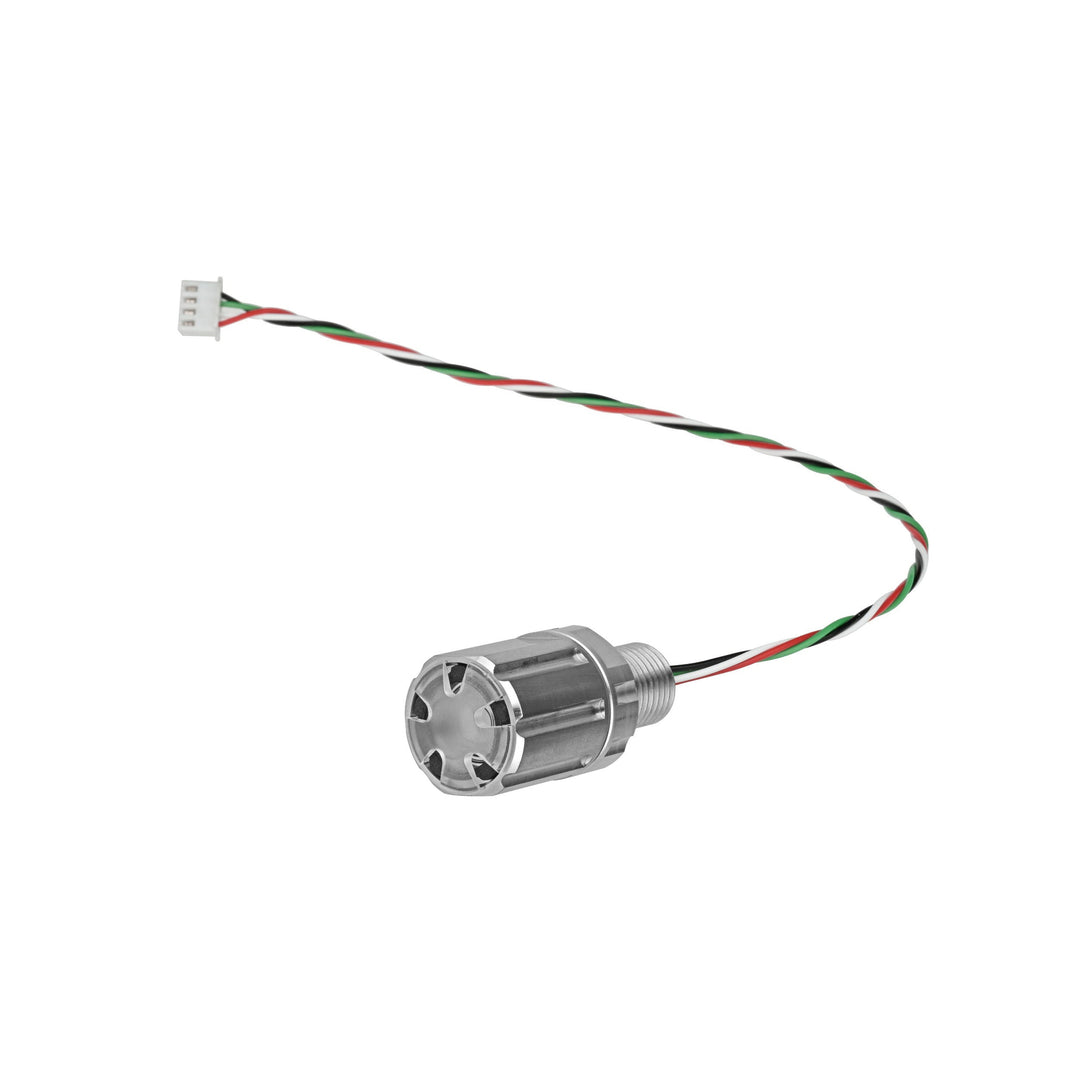

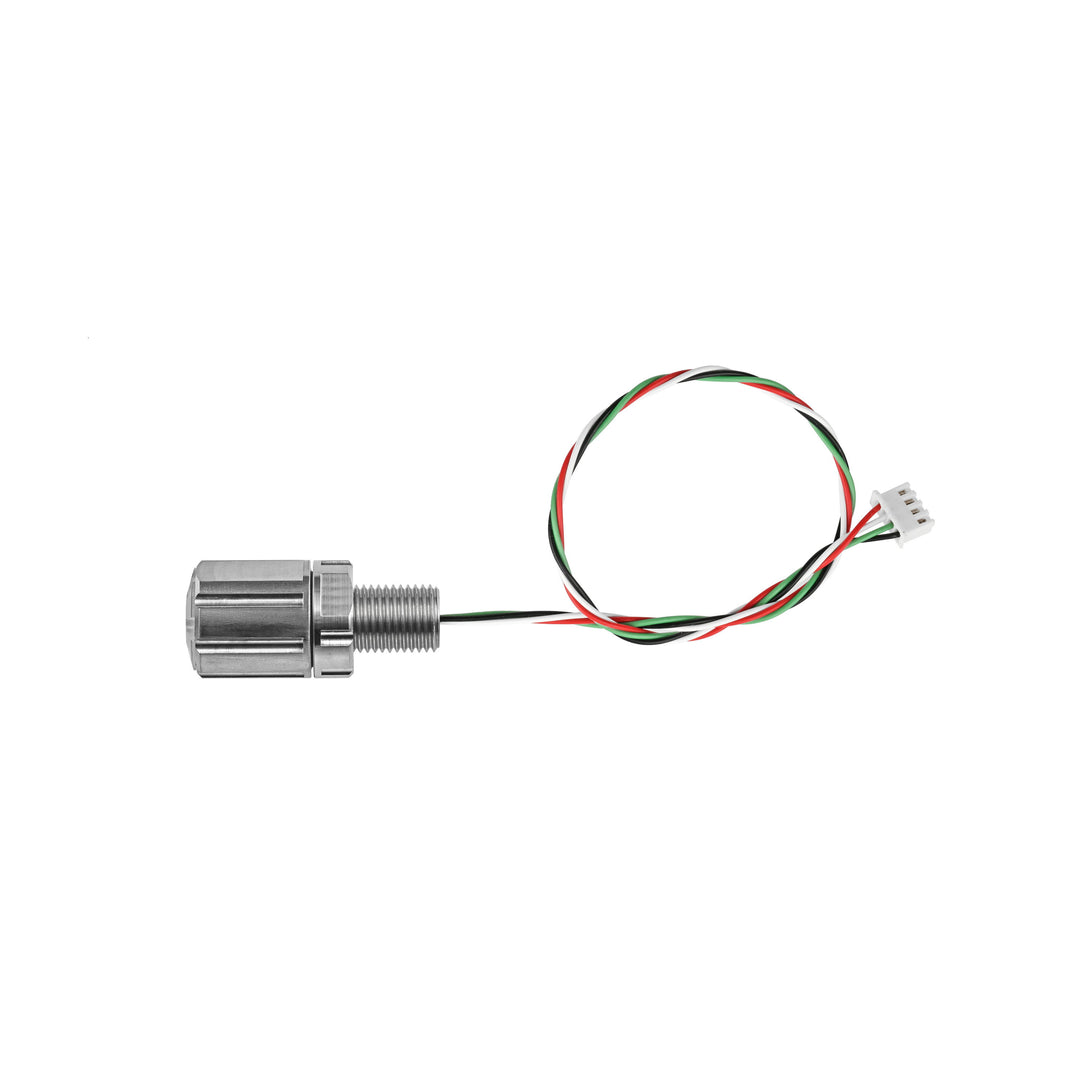








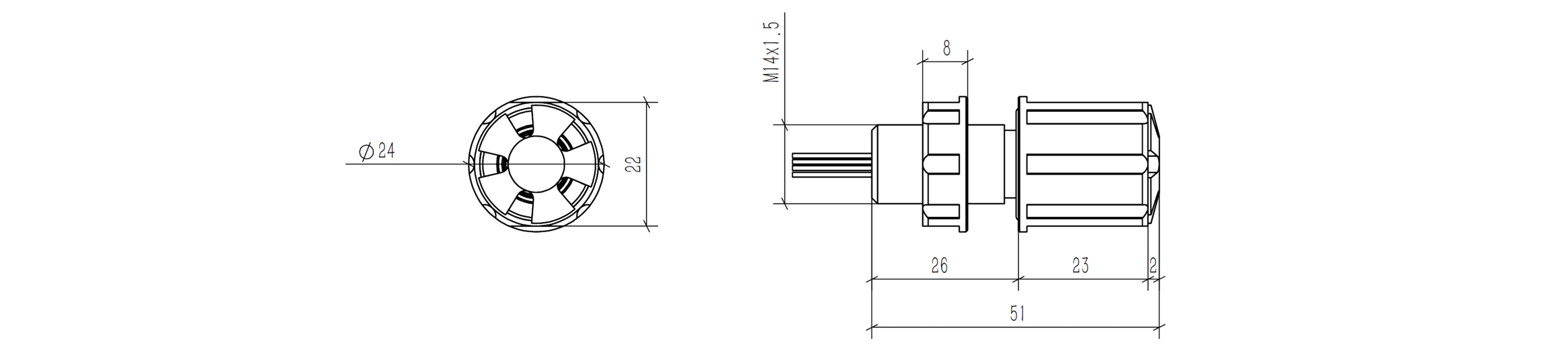
Le capteur de profondeur sous-marin M14 à membrane métallique est conçu pour une immersion longue durée et une durabilité optimale dans des environnements sous-marins exigeants. Il est doté d’une membrane robuste en acier inoxydable qui transmet la pression externe de l’eau au circuit de détection interne via une chambre remplie d’huile silicone. Cette conception permet un fonctionnement sans entretien, sans séchage quotidien, idéal pour les déploiements continus.
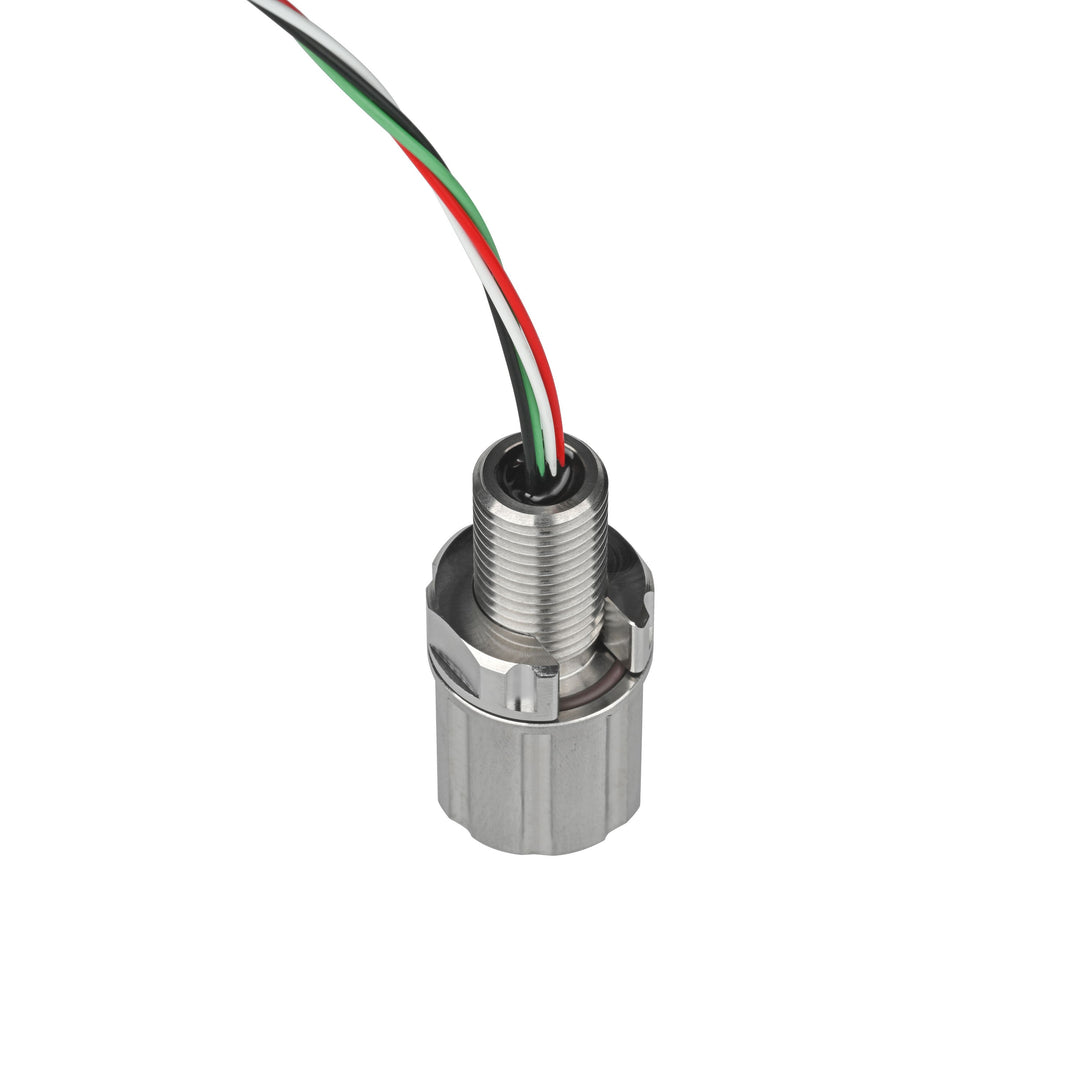
Au cœur de ce capteur se trouve une carte de traitement intégrée qui collecte des données de pression et de température sur 24 bits, applique une compensation de température et fournit des mesures de profondeur et de température en temps réel. Ces données sont transmises via une interface série utilisant une communication USART de niveau TTL (logique 5 V, 115 200 bps). Contrairement aux capteurs de profondeur basés sur l’I²C qui s’interfacent directement avec Pixhawk ou des systèmes ArduSub similaires, ce capteur communique via UART et nécessite un microcontrôleur ou un ordinateur compagnon capable de lire les données série TTL. Un connecteur standard XH2.54 à 4 broches et un câble pigtail de 300 mm sont inclus pour une intégration simplifiée.
Cette architecture offre une précision et une fiabilité accrues, notamment pour les applications haute pression ou de longue durée où la robustesse est essentielle. La conception interne scellée à l’huile et à la membrane isole également les éléments de détection de la contamination physique ou de la dérive de salinité. Pour les applications où une grande durabilité et l’absence de maintenance quotidienne sont prioritaires, ce capteur constitue une solution de mise à niveau robuste par rapport aux options plus compactes basées sur l’I²C.

Ce capteur est idéal pour les applications d’immersion longue durée et de haute fiabilité. Pour des déploiements compacts et économiques, deux autres capteurs de profondeur Blu-Sub sont disponibles avec la plateforme MS5837.
Capteur de profondeur sous-marin M8 (0–30 bar)
Capteur de profondeur ultra-compact basé sur l’I²C avec capuchon de protection fixe et corps fileté M8, conçu pour l’intégration Pixhawk/ArduSub dans des systèmes à espace restreint.
Capteur de profondeur sous-marin M10 (0–30 bar)
Capteur compatible I²C de taille moyenne avec capuchon de protection amovible et boîtier fileté M10, idéal pour des constructions modulaires et un accès facile à la maintenance.

Le capteur de profondeur sous-marin M14 à membrane métallique s’installe dans une variété de boîtiers sous-marins Blu-Sub à l’aide d’un trou de montage M14 de taille appropriée. Chaque boîtier doit offrir une étanchéité adéquate, une épaisseur de cloison suffisante et un dégagement interne adapté au corps du capteur et au câblage.
Boîtier étanche sous-marin
Boîtier compact en aluminium avec indice de profondeur de 300 m, prépercé avec vingt ports M10 — idéal pour les capteurs, indicateurs ou commutateurs M10. L’installation d’un capteur M14 nécessite un perçage personnalisé.
Tube de boîtier sous-marin en acrylique
Corps transparent en acrylique coulé avec indice de profondeur de 250 m, utilisé avec des embouts et des brides compatibles. L’installation d’un capteur M14 nécessite un embout personnalisé en aluminium ou en acrylique afin d’assurer une étanchéité et un support adéquats.
Tube de boîtier sous-marin en aluminium
Boîtier robuste en aluminium avec indice de profondeur de 1 000 m. L’installation d’un capteur M14 nécessite un embout personnalisé en aluminium ou en acrylique afin d’assurer un montage sécurisé et une étanchéité fiable. Idéal pour les déploiements à long terme ou en eaux profondes.
| Spécification | Capteur de profondeur M14 |
|---|---|
| Filetage | M14 × 1,5 |
| Matériau | Acier inoxydable |
| Tension | 5 V |
| Courant nominal | 20 mA |
| Mode de communication | USART (TTL) |
| Débit en bauds | 115200 |
| Plage de pression | 0–35 bar |
| Surpression | 2 × plage de pression |
| Erreur intrinsèque | ±0,2 % FS (±0,72 m) |
| Plage d’erreur totale | ±1 % FS (3,6 m) |
| Température de fonctionnement | -10 ~ 80 ℃ |
| Précision de la température | ±2 ℃ |
| Longueur du câble | Environ 300 mm |
| Type de connecteur | XH2.54–4 broches |

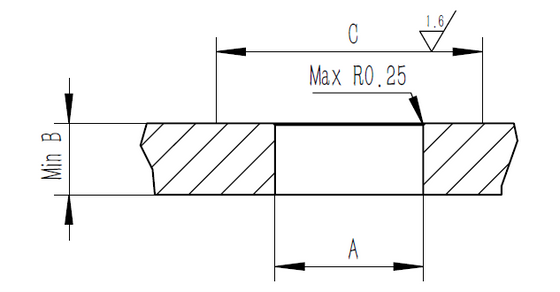
| Taille recommandée | Capteur de profondeur M14 |
|---|---|
| Diamètre du trou traversant de cloison recommandé (A) | Ø14,1 ± 0,1 |
| Épaisseur de la cloison (B) | 18 mm |
| Plage de surface (C) | 26 mm |
| Étiquette | Fil | Nom | Description de la fonction |
|---|---|---|---|
| 1 | Rouge | + | Alimentation positive (5 V c.c.) |
| 2 | Blanc | TX | Transmission port série (TXD) |
| 3 | Vert | RX | Réception port série (RXD) |
| 4 | Noir | − | Alimentation négative (GND) |
| Contrôleur externe | Capteur de profondeur M14 |
|---|---|
| 5 V | 5 V |
| RXD | TXD |
| TXD | RXD |
| GND | GND |
T=XX.XXD=XX.XX\r\n\r\n : fin de chaque ligne de donnéesT=25.27D=1.21 signifie 25,27 °C et 1,21 m| Commande série | Description | Valeur par défaut |
|---|---|---|
!Fxxxx\r\n |
Définit la densité de liquide utilisée pour le calcul. « xxxx » représente la densité du liquide. Eau douce : 997 kg/m³ | Eau salée : 1029 kg/m³ |
997 |
!Dxx.xx\r\n |
Commande réservée pour régler le décalage de sortie profondeur. « xx.xx » est un décalage à virgule flottante. |
0 |
!Txx.xx\r\n |
Commande réservée pour régler le décalage de sortie température. « xx.xx » est un décalage à virgule flottante. |
0 |
!!\r\n |
Met en pause la sortie du capteur. Le port série affiche tous les paramètres. | Aucun |
!R\r\n |
Réinitialise la carte de calcul. | Aucun |
!r\r\n |
Restaure tous les réglages initiaux. | Aucun |
!C\r\n |
Efface tous les réglages de décalage. | Aucun |
!!\r\n) :!D0.55 appliqué à une valeur mesurée de −0,55 → Sortie = 0,00!D-0.10 appliqué à une valeur mesurée de 0,10 → Sortie = 0,00!T1.00 appliqué à 25,00 °C → Sortie = 26,00 °C!T-1.00 appliqué à 25,00 °C → Sortie = 24,00 °C!Txx.xx\r\n en se référant à une source de température externe connue.
Le capteur intègre-t-il une carte de traitement ?
Oui. Le capteur contient une carte interne qui capture les données de pression et de température sur 24 bits, applique une compensation de température et fournit des mesures de profondeur et de température en temps réel via une interface série TTL.
Peut-on rallonger les fils ?
Le capteur utilise une communication série TTL, ce qui n’est pas idéal pour de longs câbles. Si un rallongement est nécessaire, utilisez un convertisseur de niveau pour passer en RS-232 ou RS-485 afin de réduire le taux d’erreur binaire (TEB).
Le capteur nécessite-t-il un étalonnage ? Quelles données sont émises par le port série ?
Le capteur transmet directement les valeurs de profondeur et de température par liaison série. Un étalonnage peut être effectué en surface si nécessaire, mais les données sont déjà traitées et ne nécessitent aucun décodage ni compensation supplémentaire.
Que faire si la membrane métallique est rayée ou cabossée ?
Si la membrane est déformée, par exemple à cause d’un outil ou de piqûres, le capteur ne doit pas être utilisé, car cela peut compromettre à la fois la précision des données et l’intégrité de l’étanchéité.
Puis-je appliquer une pression avec mon doigt pour tester le capteur ?
Non. La pression manuelle est inégale et peut déformer la membrane métallique sensible, surtout avec les ongles. Évitez tout test de pression directe.
Est-il directement compatible avec ArduSub ?
Non, le capteur utilise une sortie série TTL et n’est pas plug-and-play avec les systèmes ArduSub. L’intégration nécessite un firmware personnalisé ou une interface supplémentaire.