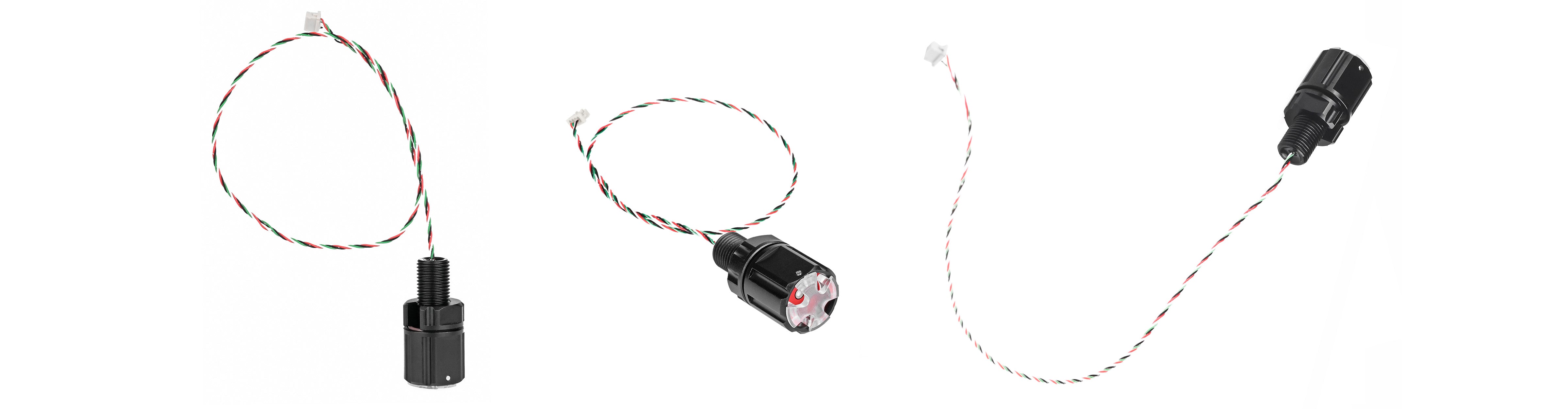
Le capteur de profondeur sous-marin M10 est conçu autour du capteur de pression numérique MS583730BA et offre des mesures barométriques haute résolution pour les applications sous-marines. Son corps fileté M10×1 permet une intégration sécurisée dans les parois de boîtiers ou les modules de capteurs, grâce à un joint torique et un écrou inclus pour un montage simplifié. Son format compact en fait un excellent choix pour les ROV, les drones sous-marins et les systèmes de capteurs embarqués soumis à des contraintes d’espace.
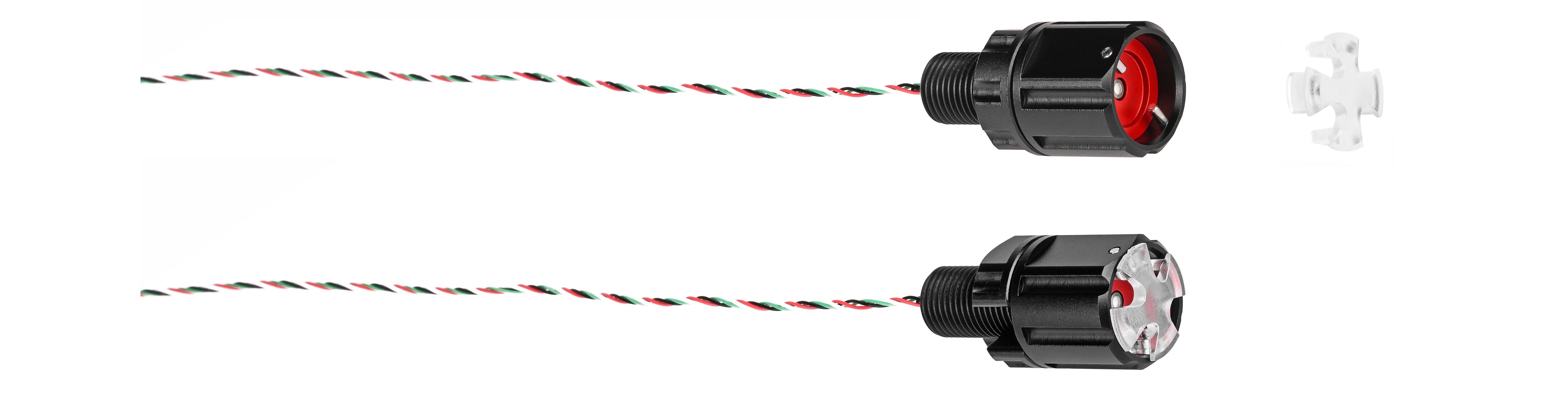
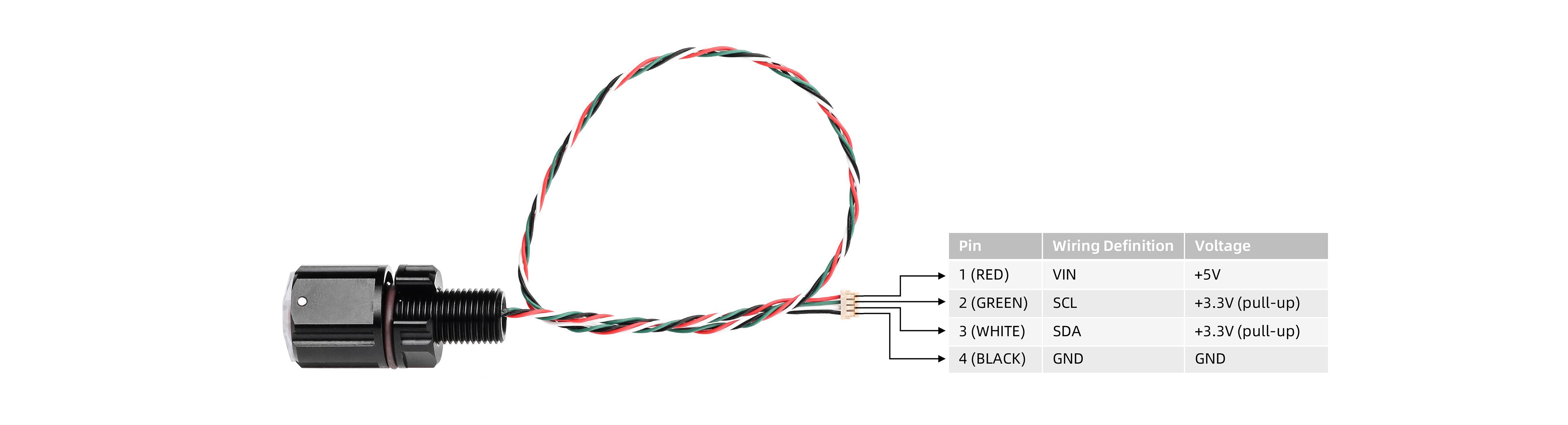
Conçu pour une compatibilité étendue, ce capteur utilise la communication I²C et inclut un câblage DF13 clairement identifié (VIN, GND, SDA, SCL), permettant aux développeurs de l’intégrer à une large gamme de systèmes de contrôle au-delà d’ArduSub. Sa faible consommation d’énergie et sa profondeur nominale élevée (300 m) en font un candidat idéal pour les systèmes mobiles et alimentés par batterie. Le capuchon de protection remplaçable protège la membrane sensible à la pression pendant le fonctionnement et le nettoyage, notamment dans les environnements contenant du sable ou des particules.
Pour maintenir des performances optimales, il est essentiel de sécher quotidiennement les capteurs équipés de la puce MS5837 hors de l’eau pendant au moins deux heures. Cela évite toute dérive du signal à long terme et préserve la précision des mesures. Les systèmes nécessitant une immersion continue ou des intervalles de maintenance réduits devraient plutôt envisager le capteur de profondeur sous-marin M14 à membrane métallique (0–35 bar / 0–350 m), plus adapté aux scénarios d’utilisation continue.

Le capteur M10 offre une conception équilibrée avec un capuchon amovible et une interface I²C standard. Pour des formats plus compacts ou une meilleure résistance à la pression, envisagez les options ci-dessous.
Capteur de profondeur sous-marin M8 (0–30 bar / 0–300 m)
Capteur de profondeur compact compatible I²C avec un corps fileté M8 et un capuchon de protection fixe, adapté aux systèmes embarqués et aux environnements à espace restreint.
Capteur de profondeur sous-marin M14 à membrane métallique (0–35 bar / 0–350 m)
Capteur de profondeur haute fiabilité doté d’un diaphragme en acier inoxydable et d’une chambre de détection remplie d’huile, conçu pour une immersion continue et une sortie de données via USART.

Tous les capteurs de profondeur Blu-Sub sont conçus pour une installation harmonieuse dans une gamme de boîtiers sous-marins. Que vous construisiez un module de capteur compact ou un système de contrôle conçu pour les grandes profondeurs, chaque boîtier permet le montage et l’étanchéité appropriés des capteurs filetés M8, M10 ou M14.
Boîtier étanche sous-marin
Boîtier compact en aluminium avec indice de profondeur de 300 m, prépercé avec vingt ports M10 pour une intégration directe avec les capteurs filetés M10. Pour les capteurs M14, un port percé sur mesure est requis.
Tube de boîtier sous-marin en acrylique
Tube transparent en acrylique coulé conçu pour des profondeurs de 20 à 250 m, compatible avec les embouts Blu-Sub en aluminium ou en acrylique. Sélectionnez un embout avec la taille de trou appropriée (M8, M10 ou M14) pour le capteur choisi.
Tube de boîtier sous-marin en aluminium
Tube en aluminium conçu pour les grandes profondeurs jusqu’à 1 000 m. Nécessite des embouts assortis en aluminium ou en acrylique percés avec le filetage approprié (M8, M10 ou M14) pour le montage du capteur.
Le tube de couplage sous-marin M10 permet le montage externe de ce capteur de profondeur lorsque l’accès à la cloison est limité. Il offre un espace interne pour le câblage et peut être scellé avec de l’époxy pour assurer l’étanchéité et le soulagement de traction. Idéal pour les configurations modulaires de ROV ou d’AUV utilisant des filetages M10×1 standard.

Ce produit peut être installé à l’aide de la clé d’installation universelle M8/M10, un outil dédié conçu pour les composants Blu-Sub M8 et M10 de type traversant, tels que les pénétrateurs, interrupteurs, capteurs et connecteurs.
Sa conception compacte à double extrémité permet l’installation dans des configurations étroites ou rapprochées, tandis que les fentes de passage de câble permettent à la clé de glisser sur des câbles déjà connectés, facilitant ainsi l’installation ou la maintenance sans déconnexion du câblage.


| Spécification | Capteur de profondeur sous-marin M10 (0–30 bar / 0–300 m) |
|---|---|
| Matériau | Aluminium anodisé noir |
| Filetage | M10 × 1 |
| Tension | 5 V |
| Courant de crête | 1,5 mA |
| Communication | I²C (IIC) |
| Tension logique I²C (SDA/SCL) | 3,3 V |
| Adresse I²C | 0x76 (1110110 b) |
| Définition du câblage |
Rouge : VIN Vert : SCL Blanc : SDA Noir : GND |
| Type de connecteur | DF13-4S-1.25C |
| Longueur du câble | Env. 300 mm |
| Pression de service | 0–30 bar |
| Profondeur de fonctionnement | 0–300 m |
| Surpression | 50 bar |
| Résolution de pression | 0,2 mbar |
| Précision relative | ±200 mbar |
| Température de fonctionnement | –20 ~ 85 °C |
| Précision de la température | ±4 °C (0–60 °C) |
| Puce du capteur | MS5837-30BA |
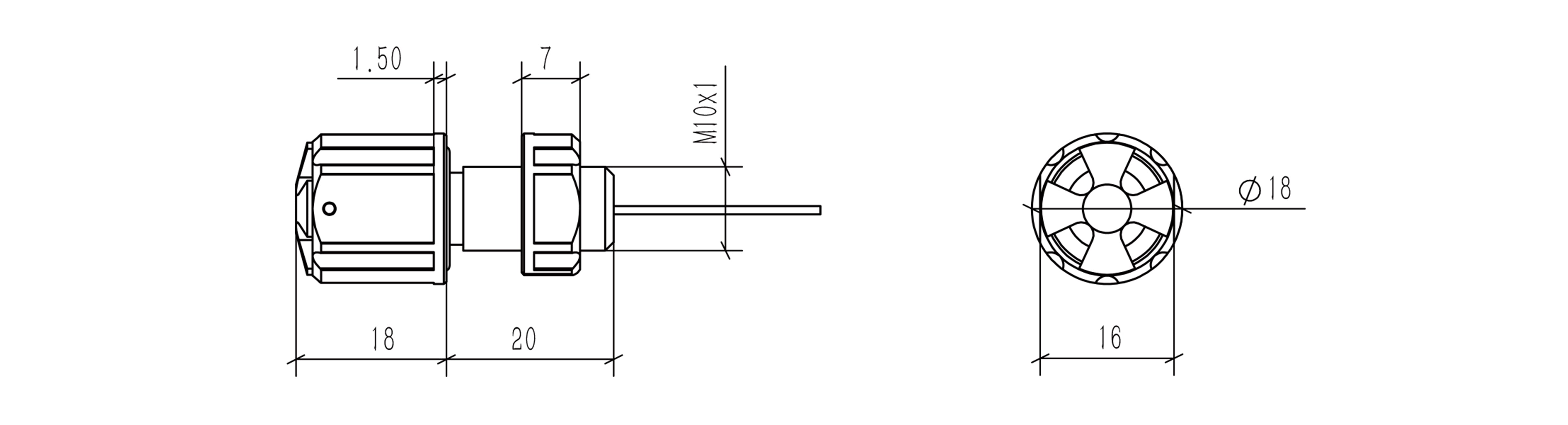
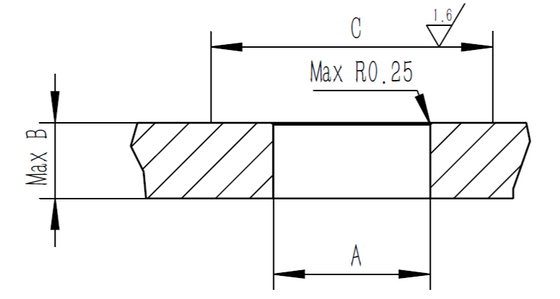
| Taille recommandée | Capteur de profondeur M10 |
|---|---|
| Diamètre du trou de cloison recommandé (A) | Ø10,1 ± 0,1 |
| Épaisseur du panneau d’écoutille (B) | 13 mm |
| Portée de surface (C) | 20 mm |
Le câble peut-il être rallongé ?
Oui, mais il faut être prudent avec la communication I²C. Des câbles trop longs ou des bus partagés peuvent perturber la synchronisation. Ce problème peut être atténué en utilisant des résistances de tirage plus fortes ou en intégrant une puce relais/répéteur I²C.
Comment lire les données sans utiliser ArduSub ? Des exemples de code sont-ils disponibles ?
La puce du capteur est largement adoptée et bien documentée. De nombreux exemples de code open source sont disponibles en ligne pour intégrer le capteur dans des systèmes personnalisés.
Comment nettoyer le capuchon de protection après l’avoir retiré ?
Rincer délicatement à l’eau tiède ou à température ambiante. Ne pas pulvériser d’eau directement ni toucher la membrane blanche souple pendant le nettoyage.
Que faire si la membrane blanche souple est endommagée ?
Si la membrane est perforée ou cassée, le capteur ne doit plus être utilisé. Son étanchéité et sa précision peuvent être compromises.
Peut-il être utilisé dans l’eau de mer et l’eau douce ?
Oui. Le capteur est conçu pour fonctionner de manière fiable dans les environnements d’eau de mer et d’eau douce.
Quels sont les avantages par rapport aux autres fabricants ?
• Haute fiabilité : conçu selon des spécifications rigoureuses pour garantir les performances du capteur de pression et une durabilité à long terme.
• Entretien facile : le capuchon de protection amovible permet une inspection et un nettoyage rapides tout en protégeant la membrane délicate du capteur contre les débris tels que le sable et le gravier.
Le capteur peut-il être utilisé sans être monté sur un embout ?
Oui. Le capteur peut être entièrement immergé s’il est correctement scellé. Pour plus d’informations, consultez la documentation sur l’étanchéité des dispositifs de type pénétrateur.